

Microminiature operation underwater robot of nuclear power plant
An underwater robot and micro-miniature technology, applied in underwater operation equipment, transportation and packaging, ships, etc., to achieve the effect of large load capacity, flexible operation, and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with accompanying drawing and specific embodiment
[0027] The invention relates to a miniature underwater operation cabled robot used in a nuclear power plant, which is composed of an underwater robot body and an onshore control system, and the two are connected through a core umbilical cable.
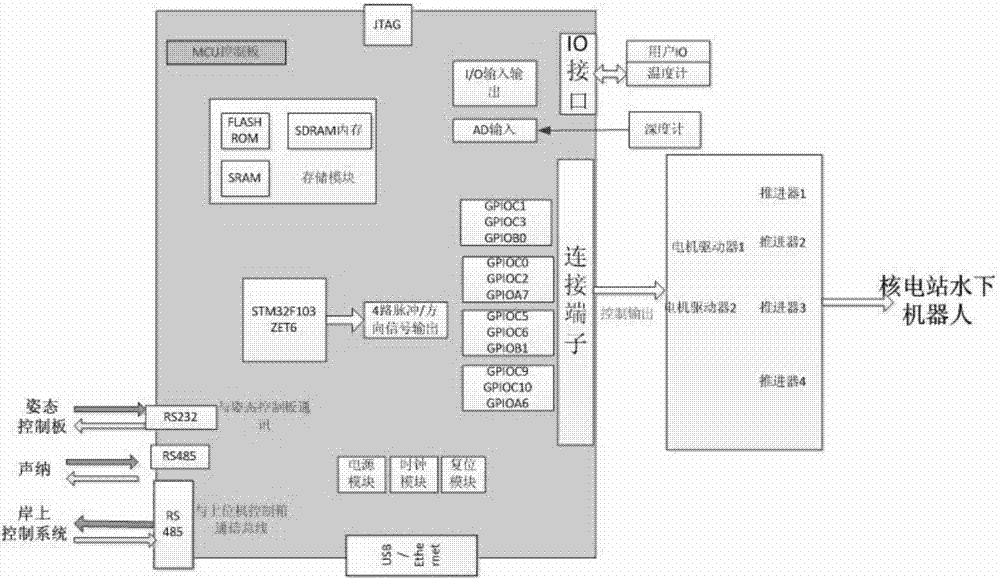
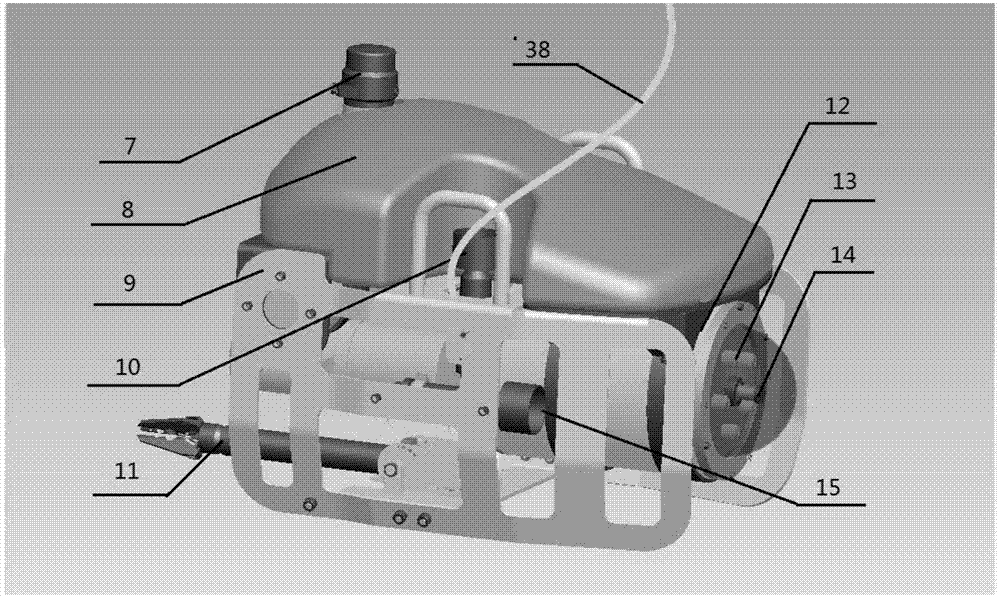
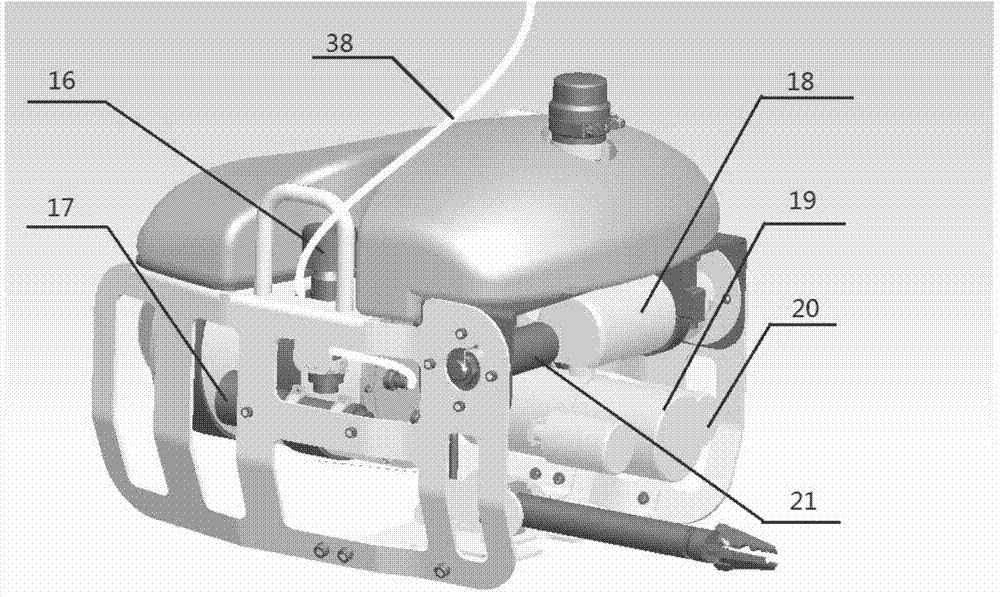
[0028] Such as figure 2 and image 3 As shown, the underwater robot body consists of propellers, front-view cameras, rear-view cameras, three-axis gyroscopes, accelerometers, three-axis magnetometers, thermometers, depth gauges, lights, cables, control cabins, control circuit boards, Composed of manipulator, support frame, buoyancy block and sonar.
[0029] Propellers are installed horizontally on both sides of the control cabin, and the center of gravity of the robot body is on the plane formed by the axis of the propeller installation. The horizontal movement of the robot can be controlled inclu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More