

Four-axis planar robot integrated system for automatic loading and unloading of high-speed notching machines
An automatic loading and unloading and integrated system technology, applied in the direction of feeding devices, manufacturing tools, positioning devices, etc., can solve problems such as monotonous machinery, harsh working environment, and poor safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] See attached picture.
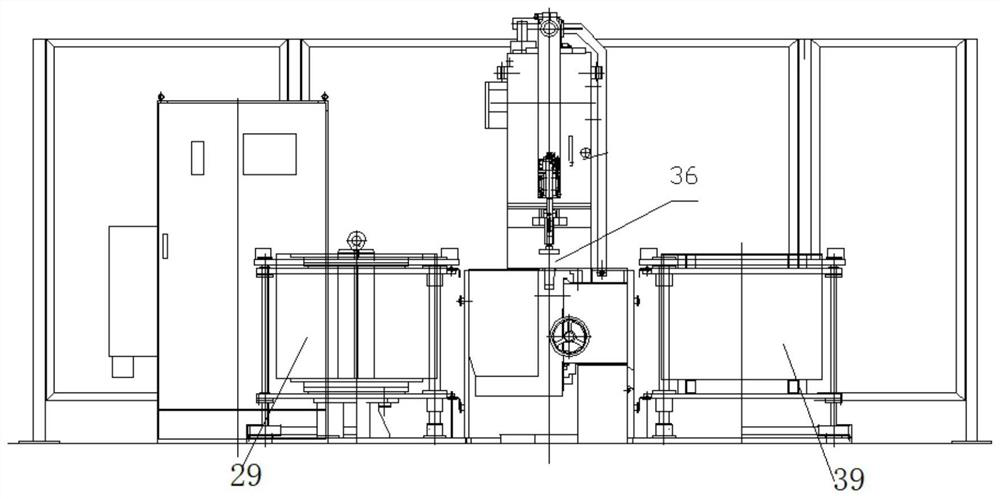
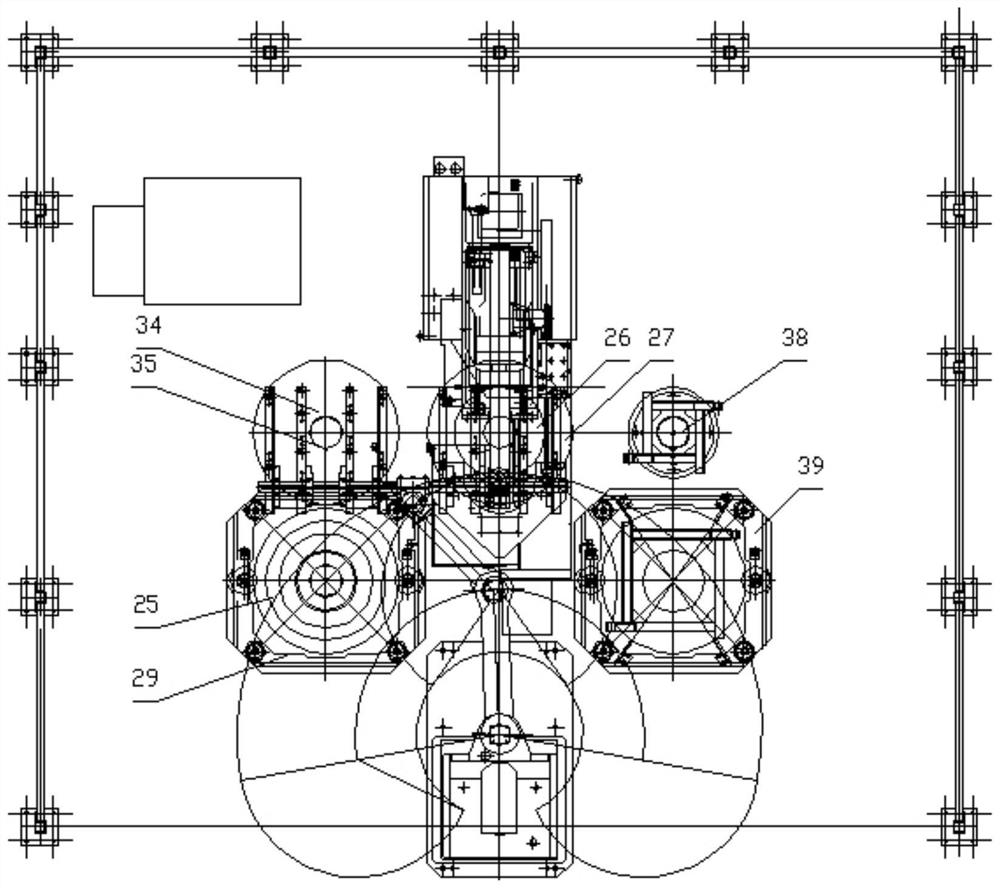
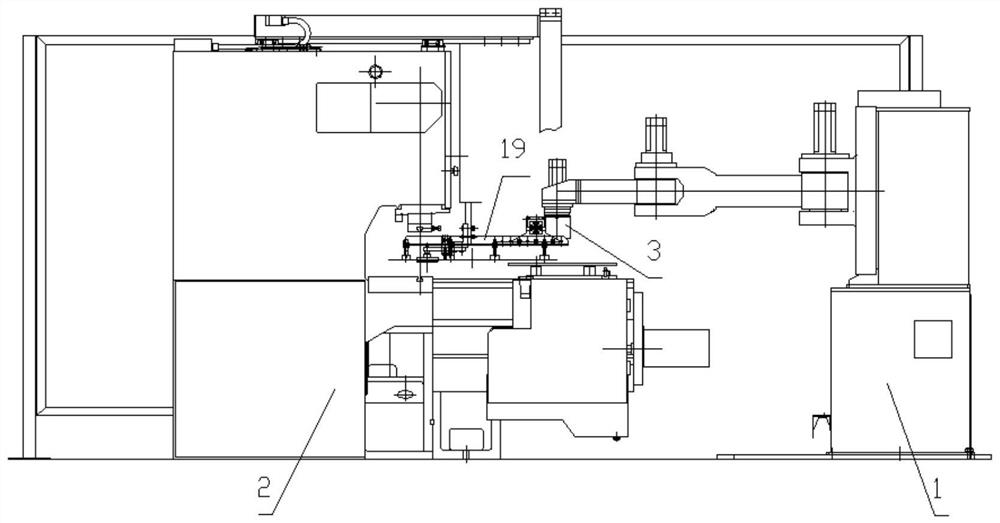
[0071] A four-axis planar robot integrated system for automatic loading and unloading of high-speed notching machines includes a high-speed notching machine 2 and a four-axis planar robot 1 located in front of the high-speed notching machine.
[0072] The four-axis planar robot 1 includes a robot main body, the robot main body is provided with a longitudinal linear guide rail 17, and the linear guide rail 17 is slidably installed with a robot arm support seat; a longitudinal screw rod is installed on the robot main body, and the arm support seat suit On the screw mandrel and cooperate with the screw mandrel to form a screw nut mechanism 16; the arm support seat is equipped with a vertical three-axis controlled by a three-axis motor 11, and the robot arm 10 is fixed on the three axis, and the robot arm 10 is fixed on the arm support seat. The rear end is the robot shoulder 13, and the robot shoulder 13 is fixedly set on the three axes, and the fro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More