

Wall climbing-gliding robot with retractable and extendable wing membranes
A gliding robot and wing-spreading technology, applied in gliders, aircrafts, motor vehicles, etc., to achieve the effect of reducing mass, reducing the mass of the whole machine, and being easy to install
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described in detail below with reference to the accompanying drawings.
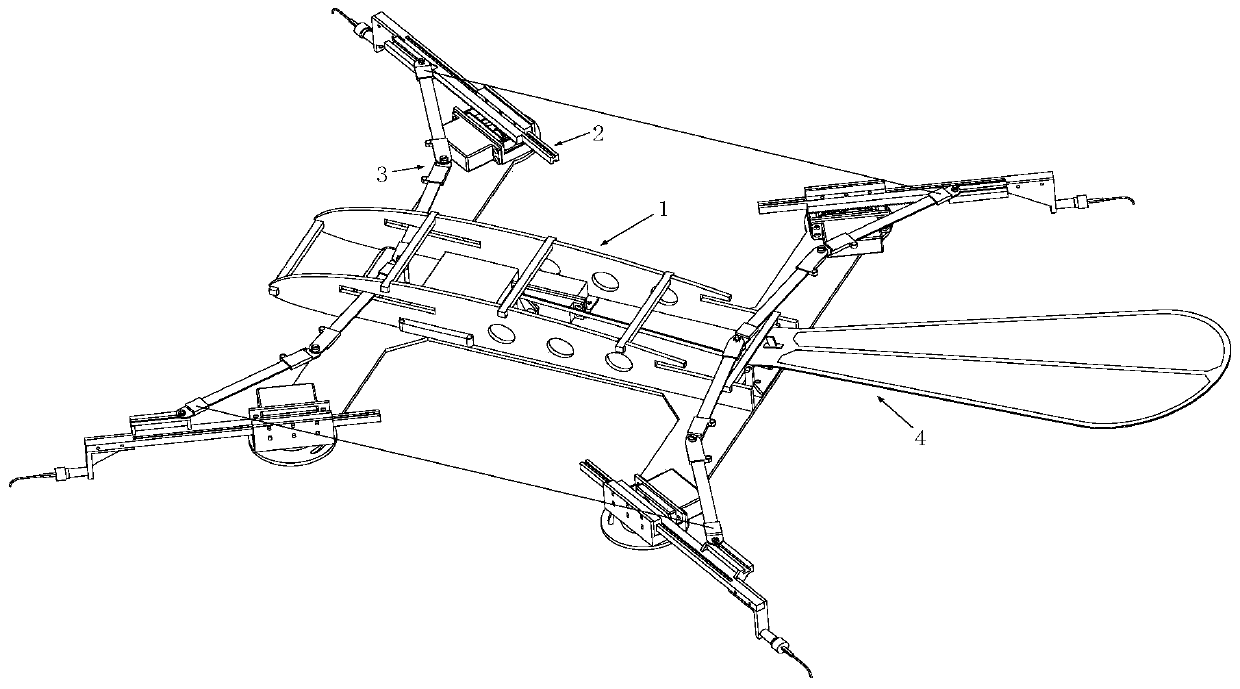
[0035] The present invention provides a wall-climbing gliding robot with retractable wing membranes, such as figure 1 As shown, it includes a body module 1 , a limb module 2 , a retractable wing membrane module 3 and a tail module 4 .
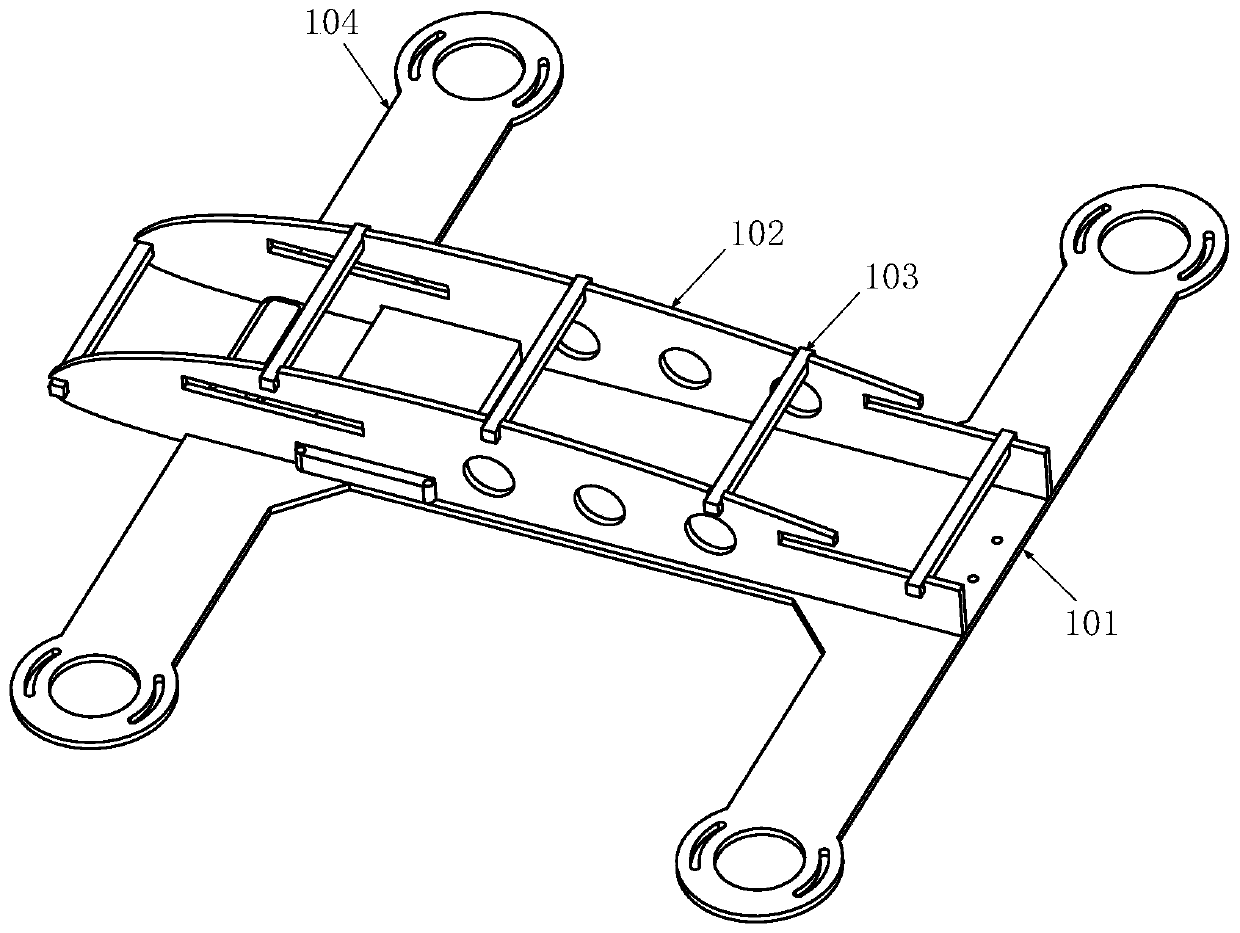
[0036] The body module 1 includes a bottom plate 101, an airfoil rib 102, and a tenon 103, all of which are made of balsa wood materials, such as figure 2 shown. Wherein, the front and rear sides of the bottom plate 101 are designed with extension parts, which serve as the limb module mounting platform 104 . The two sides of the bottom plate 101 are installed with mutually symmetrical airfoil ribs 102 perpendicular to the bottom plate. The airfoil ribs on both sides of the bottom plate 101 are also connected by tenon strips 103; the two ends of the tenon strip 103 are respectively connected with the airfoil ribs on both side...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More