

Robot loopback detection method and device
A detection method and robot technology, applied in the field of image processing, can solve problems such as difficulty in identifying changes in ambient light, and achieve the effects of improving recognition ability, improving accuracy, and correcting historical errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] Embodiments of the present invention are described in detail below, and examples of the embodiments are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0036] The present invention mainly aims at the technical problem that the bag-of-words model in the prior art is difficult to identify scenes with changing ambient light and scenes with similar textures, and proposes a robot loopback detection method.
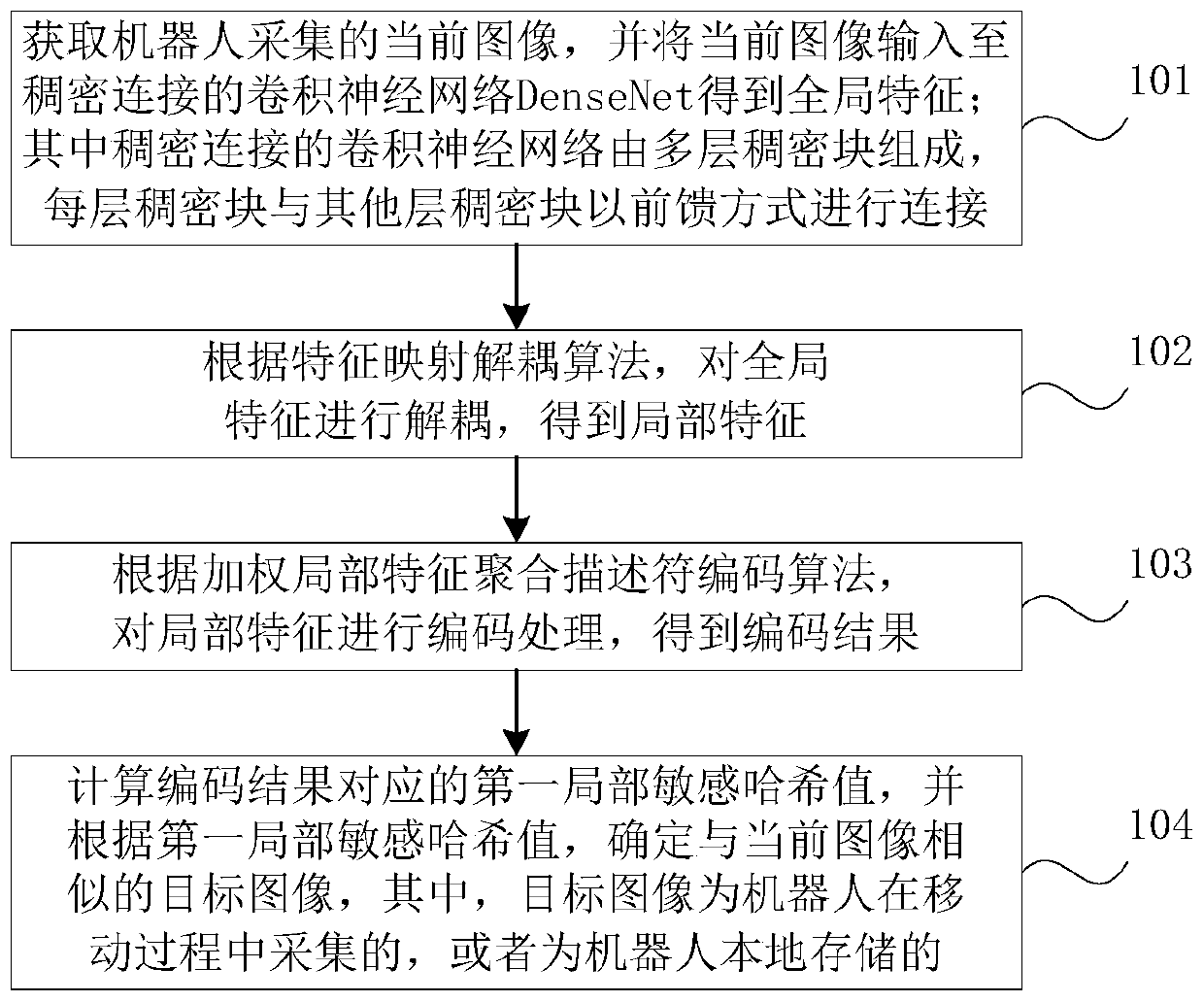
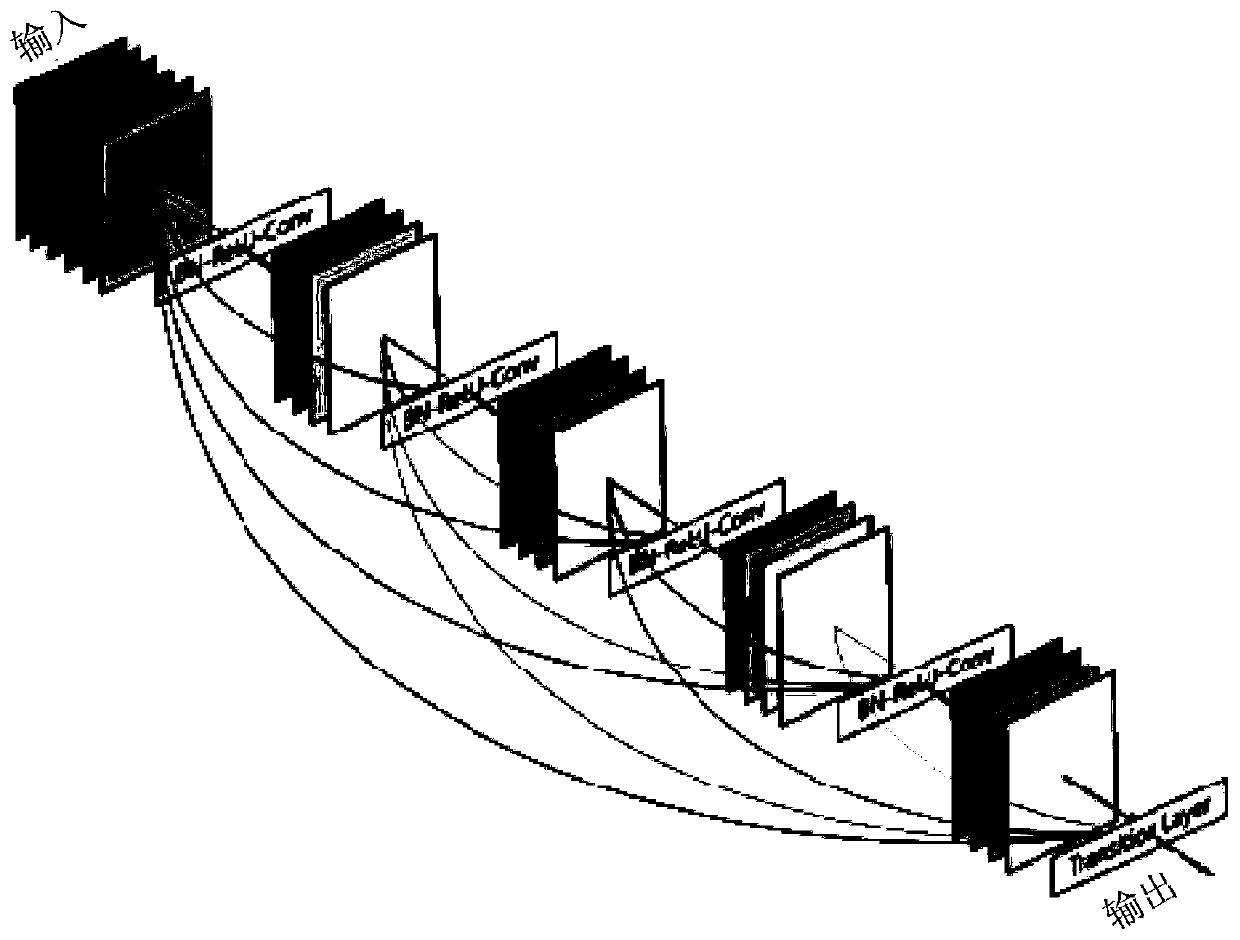
[0037] The robot loopback detection method in the embodiment of the present invention acquires the current image collected by the robot and inputs the current image to the densely connected convolutional neural network DenseNet to obtain the global features, and then, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More