

A verification method and system for safety of expected functions of an autonomous vehicle
A technology for autonomous driving and expected functions, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as lack of safety analysis methods that cannot cover expected function safety, and achieve the effect of strong operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0029] The method for evaluating the expected functional safety of an autonomous vehicle in the present invention is applicable to autonomous vehicles in various application scenarios, including autonomous vehicles of SAE L3 and above.
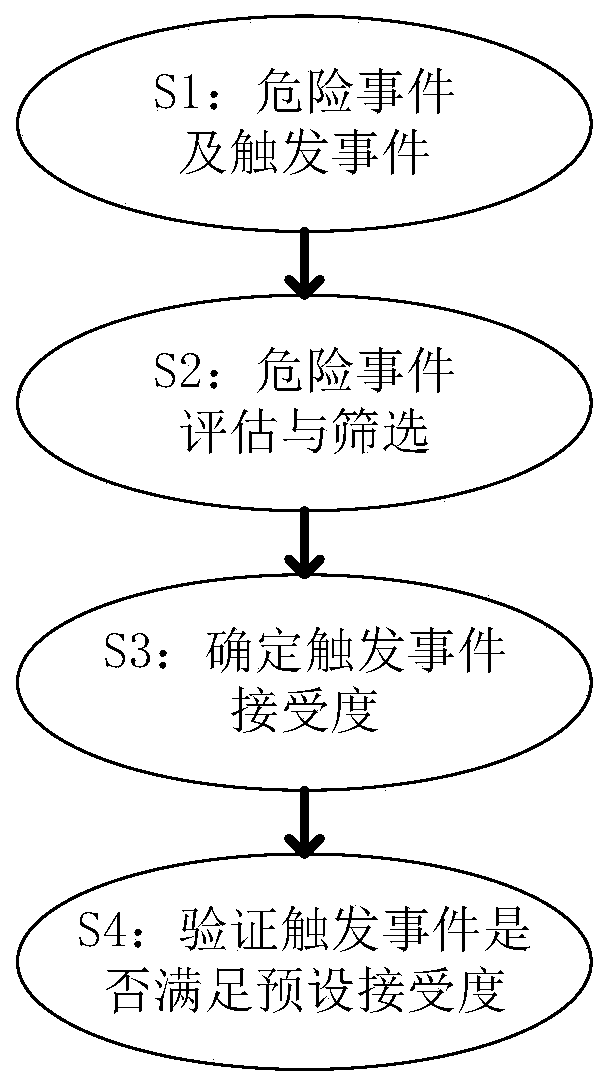
[0030] In this embodiment, the evaluated object is an SAE L3 level self-driving vehicle, defined as AV1, and the specific evaluation steps are as follows:
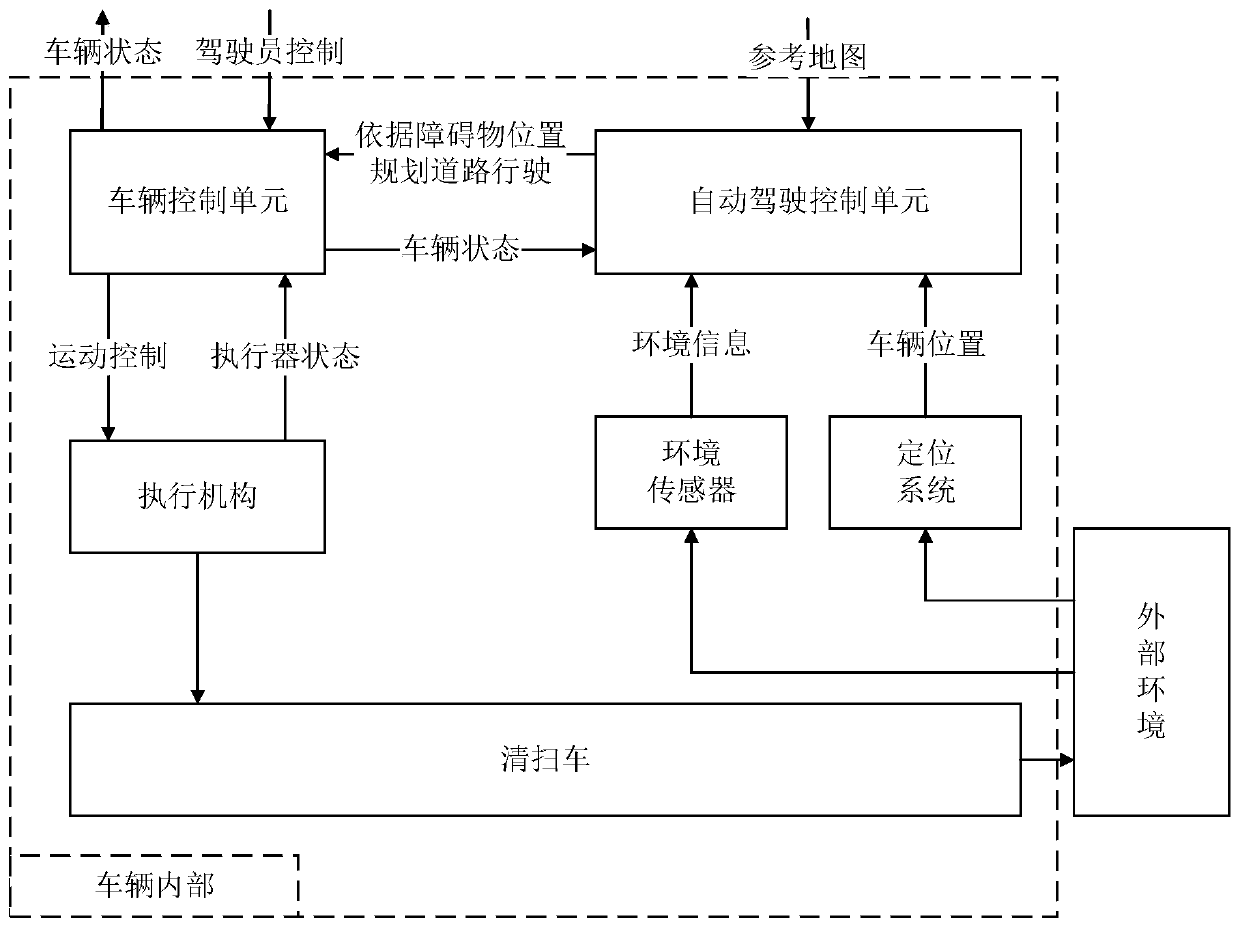
[0031] S1-1: According to the AV1 function definition and system architecture, the STPA method is used to construct the AV1 function control structure diagram. This embodiment takes the AV1 obstacle avoidance function as an example. The related control structure of the obstacle avoidance function is as follows image 3 shown;
[0032] S1-2: Determine the list of all potential dangerous events of the AV1 obstacle avoidance function, and derive the trigger events corresponding to the dangerous events and the probability of the trigger events;
[0033] The function definition and system arch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More