A low-speed park unmanned vehicle cruising and emergency braking system based on machine vision
A technology of machine vision and emergency braking, applied to instruments, computer parts, image data processing, etc., can solve problems such as shadows, weather, and light intensity, and achieve the effect of high cost and performance improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
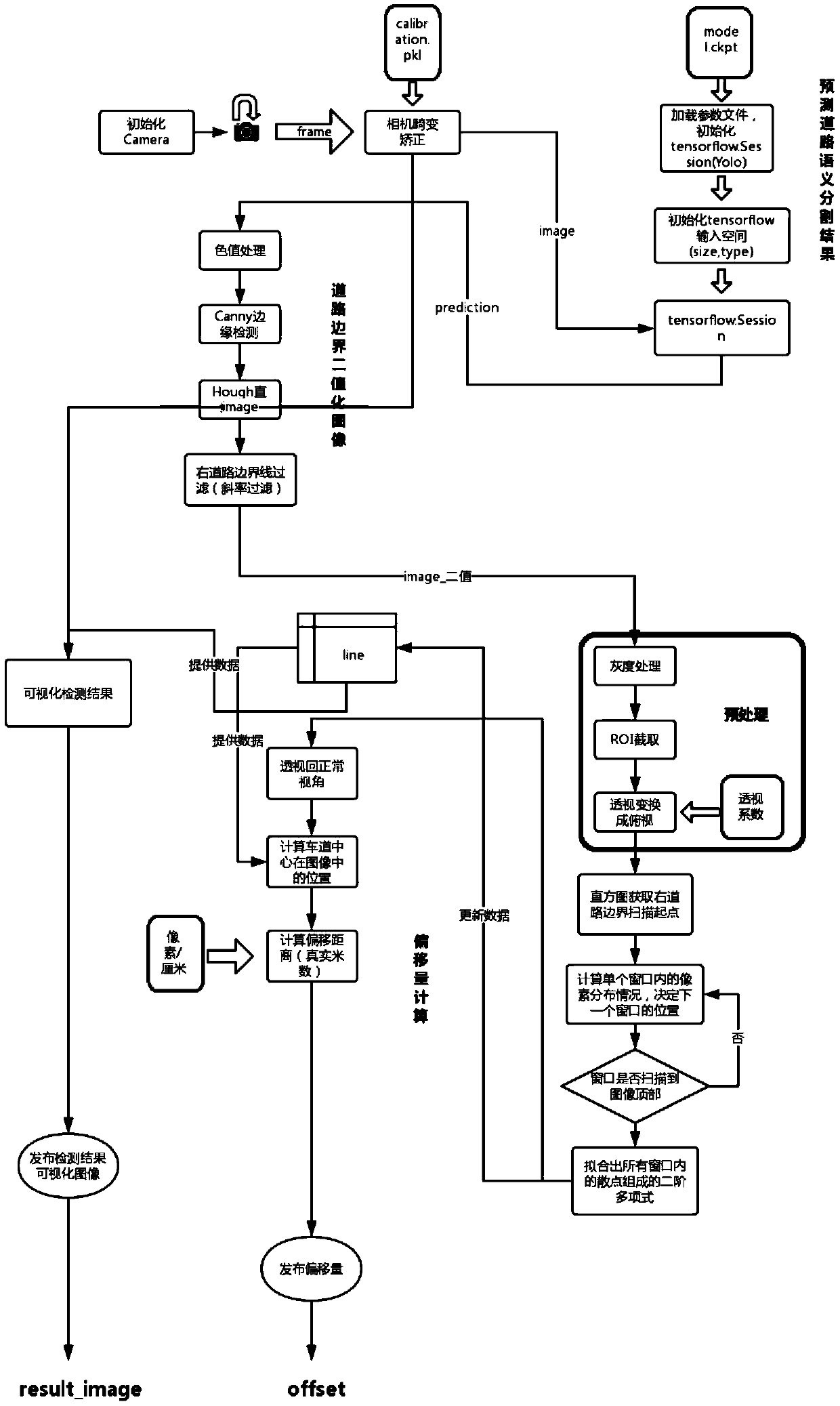
[0081] like image 3 Driving area perception flow chart, the semantic segmentation model based on ICNet makes the recognition effect of the trained model in the local environment more accurate by creating local data sets, training local data, fine-tuning parameters and network structure. Moreover, because the system only needs to perform semantic segmentation of roads, the backbone of ICNet is adjusted to reduce the size of the convolution kernel to obtain higher running speed and reduce the memory usage of the model.
[0082] The results obtained from semantic segmentation are first subjected to binarization processing to obtain a binarized image of the filtered road. Then, Canny is used to detect the outline of the road, and Hough detection identifies the straight lines that are combined into the contour. Road outline on the right.
[0083] Perform a multinomial sum fitting operation on the binarized image of the right contour of the road, find a curve that can fit the road...
Embodiment 2
[0098] 1. Vehicle cruise function
[0099] 1) Establish a road semantic segmentation model
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More