An active obstacle avoidance system for electric vehicles
An electric vehicle and obstacle avoidance technology, which is applied in the field of active obstacle avoidance systems, can solve problems such as the difficulty in judging the collision of electric vehicles and the failure of the obstacle avoidance system to consider the impact of obstacles/foreign objects on the selection of obstacle avoidance strategies.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0035] This embodiment discloses an active obstacle avoidance system, especially an electric vehicle obstacle avoidance system, an electric vehicle active obstacle avoidance system. The active obstacle avoidance system can at least generate an obstacle avoidance strategy that changes the rotation speed of each wheel hub motor of the electric vehicle according to different road condition information, inherent parameters / movement parameters of foreign objects and the remaining power of the electric vehicle. As the power source of electric vehicles, electricity is the energy output for implementing obstacle avoidance strategies. As a preferred obstacle avoidance system, this embodiment has obvious advantages compared with the prior art in that a reasonable safety model can be selected according to different road condition information, and a reasonable safety state can be selected according to the inherent parameters / motion parameters of foreign objects. Level, according to the re...
Embodiment 2
[0053] This embodiment discloses an electric vehicle, which is provided with an obstacle avoidance system. The obstacle avoidance system can at least generate an obstacle avoidance strategy that changes the rotation speed of each wheel hub motor of the electric vehicle according to different road condition information, inherent parameters / movement parameters of foreign objects and the remaining power of the electric vehicle.
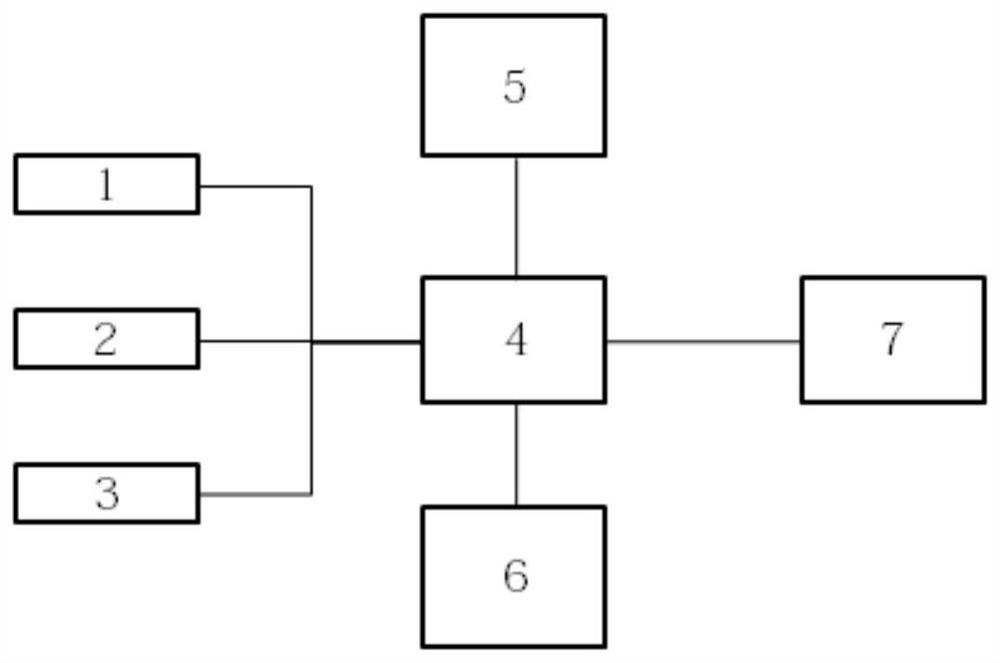
[0054] Preferably, the central processing unit 4 of the obstacle avoidance system determines whether the foreign object threatens the driving of the electric vehicle based on the driving state parameters and the inherent parameters / motion parameters of the foreign object when the third monitoring unit 3 monitors that there is a foreign object in the driving direction of the electric vehicle Safety. When the central processing unit 4 judges that the foreign object threatens the driving safety of the electric vehicle, the central processing unit 4 marks th...
Embodiment 3
[0056] This embodiment discloses an active obstacle avoidance method for an electric vehicle, aiming at at least generating an obstacle avoidance strategy that can change the rotation speed of each hub motor of the electric vehicle in combination with the remaining battery capacity of the electric vehicle under different road condition information and different foreign objects. The method includes:
[0057] S1: The central processing unit 4 reads the safety mode in the model library 5 based on the road condition information when the third monitoring unit 3 monitors that there is a foreign object in the driving direction of the electric vehicle, and based on the driving state parameters and the inherent parameters / motion parameters of the foreign object Determine whether foreign objects threaten the driving safety of electric vehicles;
[0058] S2: When the central processing unit 4 determines that the foreign object threatens the driving safety of the electric vehicle, the cen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More