

Method and system for locating weeding robot
A positioning method and robot technology, applied in the positioning and system field of weeding robots, to achieve the effect of avoiding wiring, good obstacle avoidance, and avoiding difficult to identify boundaries
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
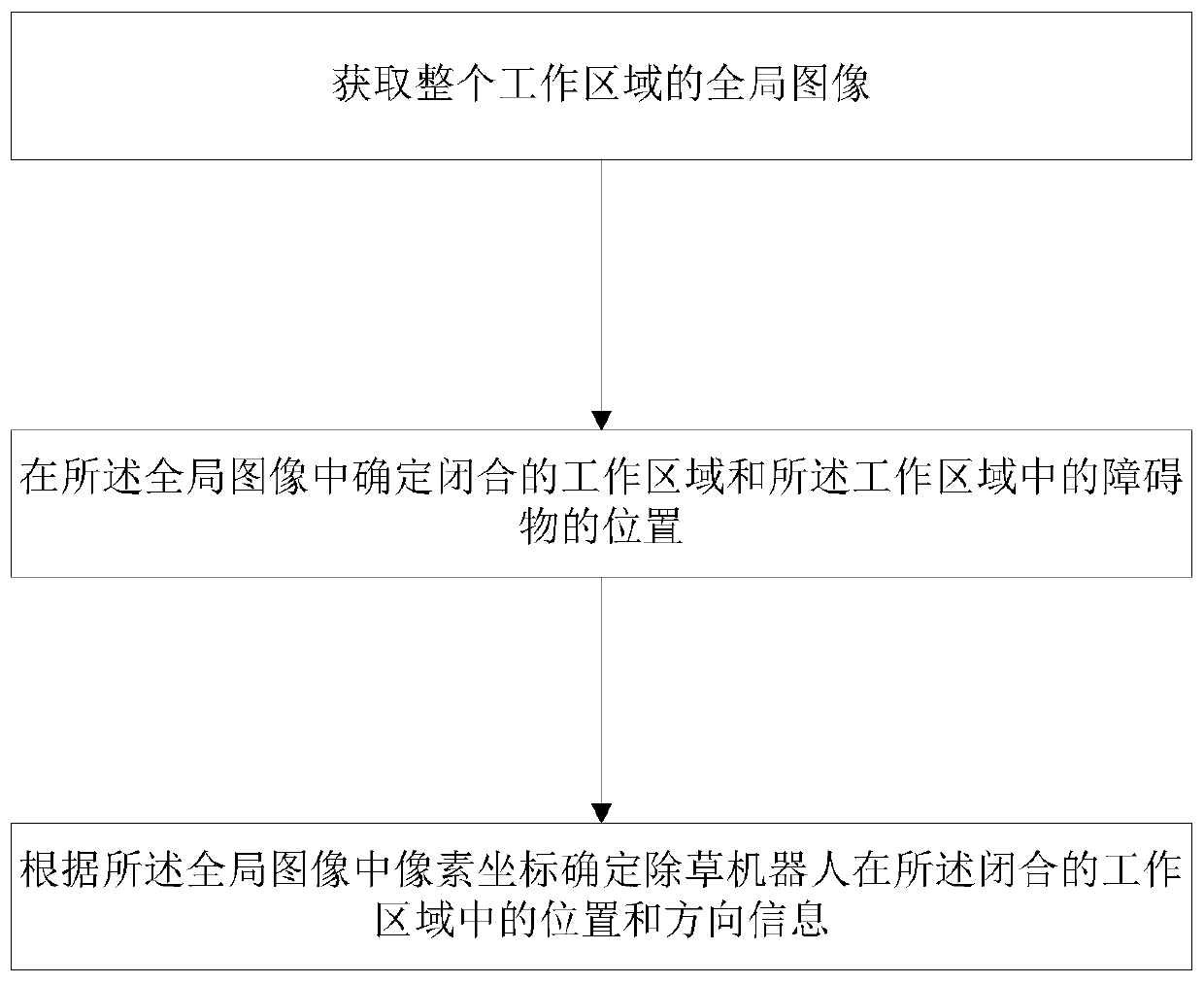
[0027] Such as figure 1 As shown, a positioning method of a robot includes the following steps:
[0028] S1: Obtain a global image of the entire working area;
[0029] S2: Determine the positions of the closed working area and the obstacles in the working area in the global image;
[0030] S3: Determine the position and direction information of the weeding robot in the closed working area according to the pixel coordinates in the global image.
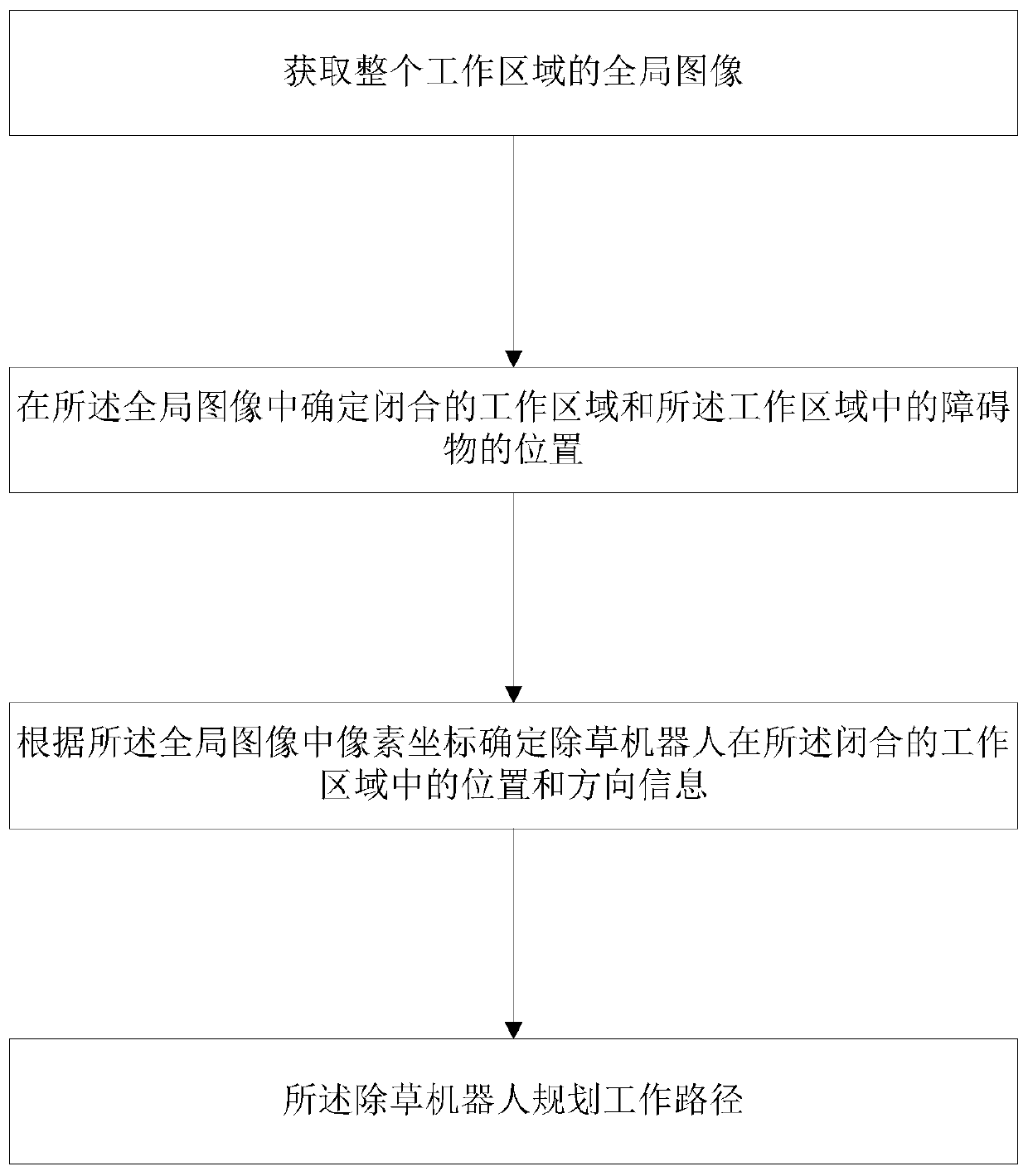
[0031] Such as figure 2 As shown, it is understandable that after obtaining the above information, the following steps can be further completed:
[0032] S4: The weeding robot plans a working path.
[0033] In order to know the status of the weeding robot in real time, the information of the global image, the position and direction information of the weeding robot, and the working path can be transmitted to the cloud in real time.
[0034] In an embodiment of the present invention, the global image is acquired by a global camera ...
Embodiment 2
[0041] Such as Figure 4 As shown, a robot positioning system includes: an image acquisition unit for acquiring a global image of the entire working area; a processor unit connected to the image acquisition unit for implementing the method described in Embodiment 1; an information transmission unit , connected with the processor unit for receiving instructions and transmitting information.
[0042] Such as Figure 5As shown, in a specific embodiment, the image acquisition unit includes: a global camera 4, the global camera 4 can be erected on a camera support pole 5 at a certain distance and a certain height from the working area, and the global camera 4 can capture the entire required In the weeding area, the camera support rod 5 can be adjusted in height, and can be fixed on the grass to provide sufficient height for the global camera. It can be understood that an appropriate height can reduce the distortion of the global image under the premise of ensuring clarity. The s...
Embodiment 3
[0056] If the system integration modules / units of the weeding robot are realized in the form of software function units and sold or used as independent products, they can be stored in a computer-readable storage medium. Based on this understanding, the present invention realizes all or part of the processes in the methods of the above embodiments, and can also be completed by instructing related hardware through a computer program. The computer program can be stored in a computer-readable storage medium, and the computer When the program is executed by the processor, the steps in the above-mentioned various method embodiments can be realized. Wherein, the computer program includes computer program code, and the computer program code may be in the form of source code, object code, executable file or some intermediate form. The computer-readable medium may include: any entity or device capable of carrying the computer program code, a recording medium, a USB flash drive, a remova...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More