

A Genetic Algorithm-Based Optimization Method for Manipulator Trajectory Planning
A trajectory planning and genetic algorithm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as single orientation, weak dynamic performance of fitness functions, and weakened real-time performance of manipulators, and achieves easy algorithm solution. Realize the effect of real-time control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with drawings and embodiments.
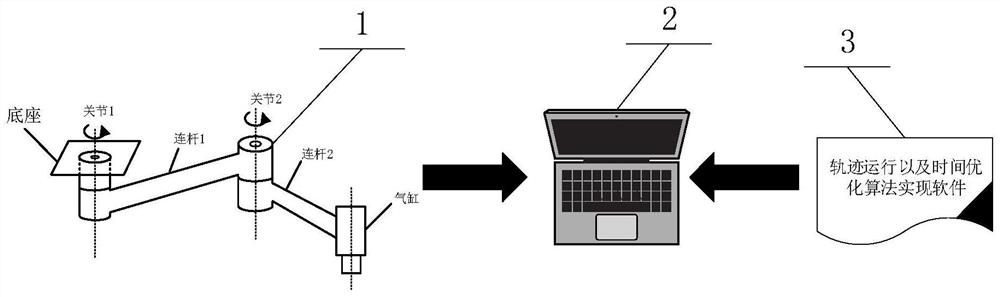
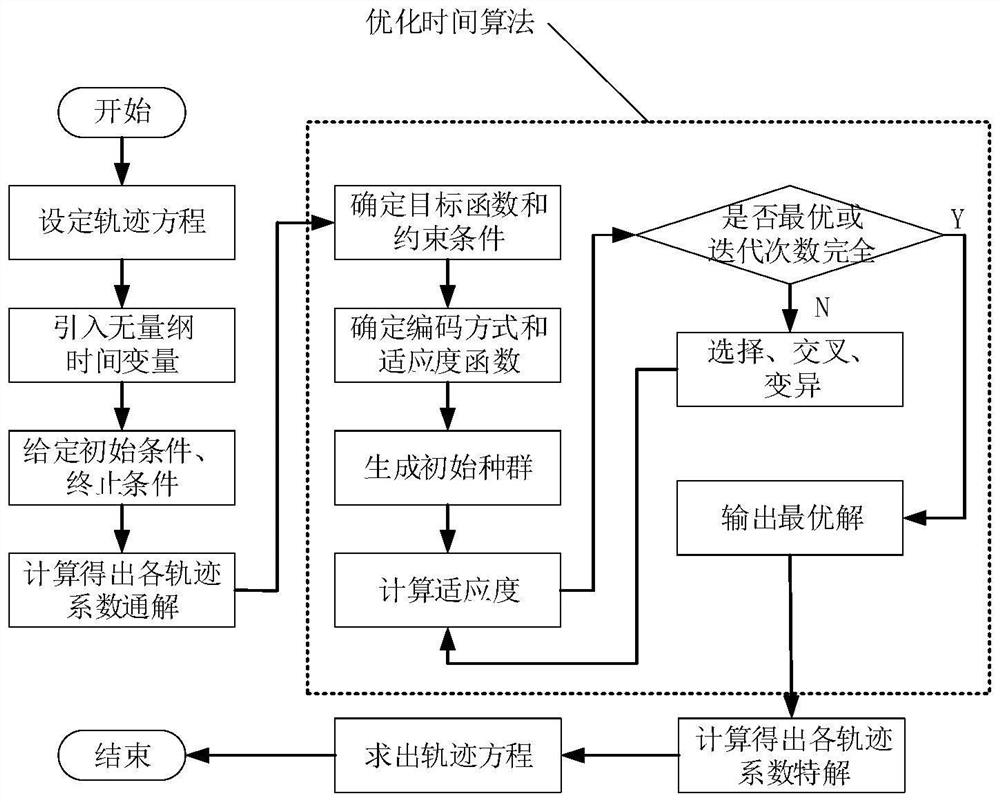
[0051] Such as figure 1 As shown, a specific embodiment of the runtime optimization of the manipulator trajectory is illustrated. Robotic arm 1 is a mechanical arm with a horizontal rotation joint with two connecting rods, and the lengths of the connecting rods are 400mm and 350mm respectively; Computer 2 is an ASUS K550V laptop with 4G memory, Intel Core i5-6300HQ CPU, and WIN 10 operating system; software 3 is the runtime optimization algorithm of the manipulator written in MatlabR2017a. Such as figure 2 As shown, the specific implementation of the algorithm is as follows:
[0052] 1. Trajectory planning: use the method of "parabolic interpolation-quintic spline interpolation-parabolic interpolation" to plan the trajectory of the manipulator in the joint space, as follows:
[0053] 1.1) The method of "parabolic interpolation-quintic spline interpolation-parabolic i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More