

Flexible palm type self-adaptive and rapid grabbing robot hand device
A robot hand and self-adaptive technology, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve problems such as difficult and fast response, and achieve the effect of simple structure, strong self-adaptive ability, and low manufacturing and maintenance costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
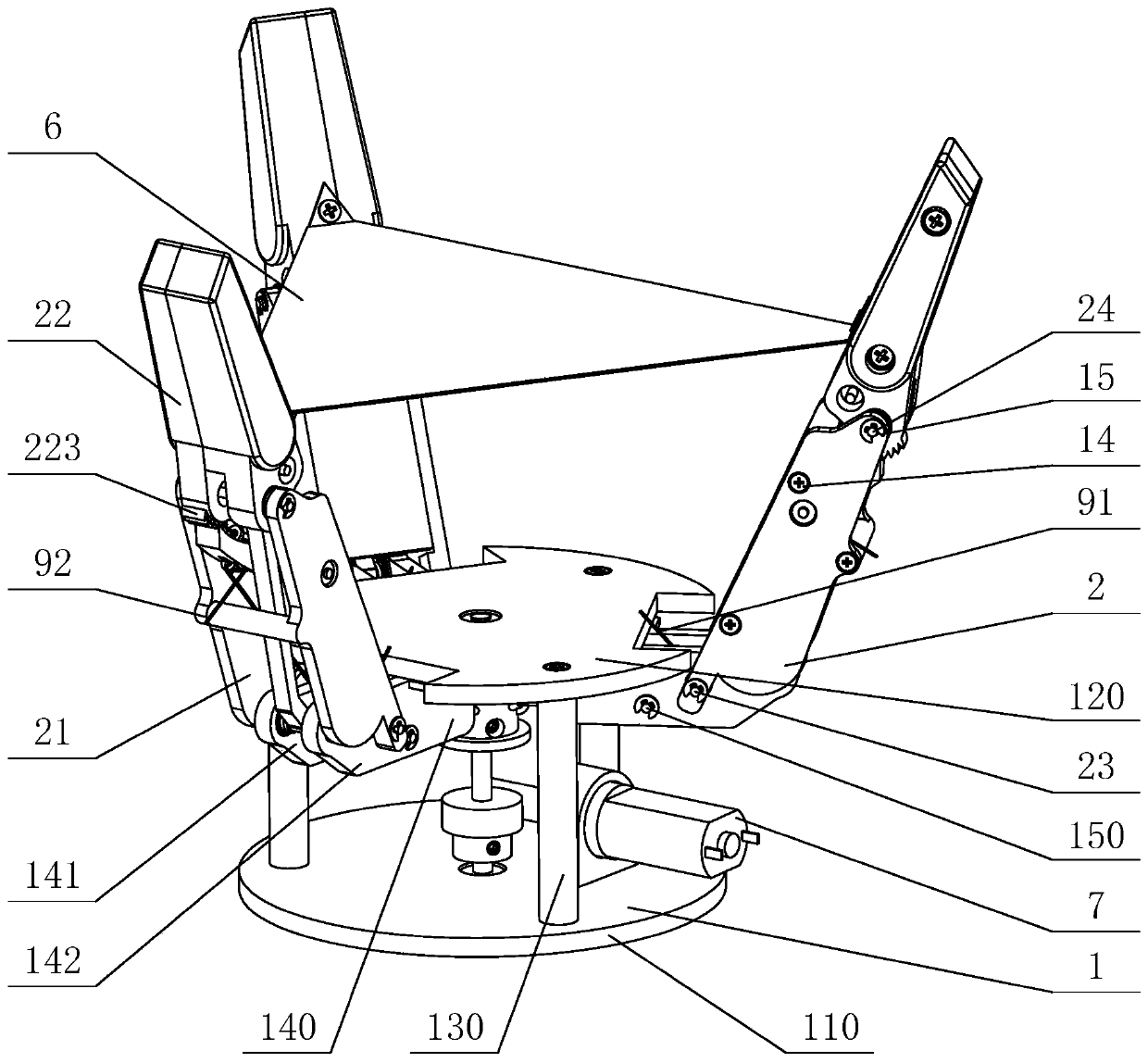
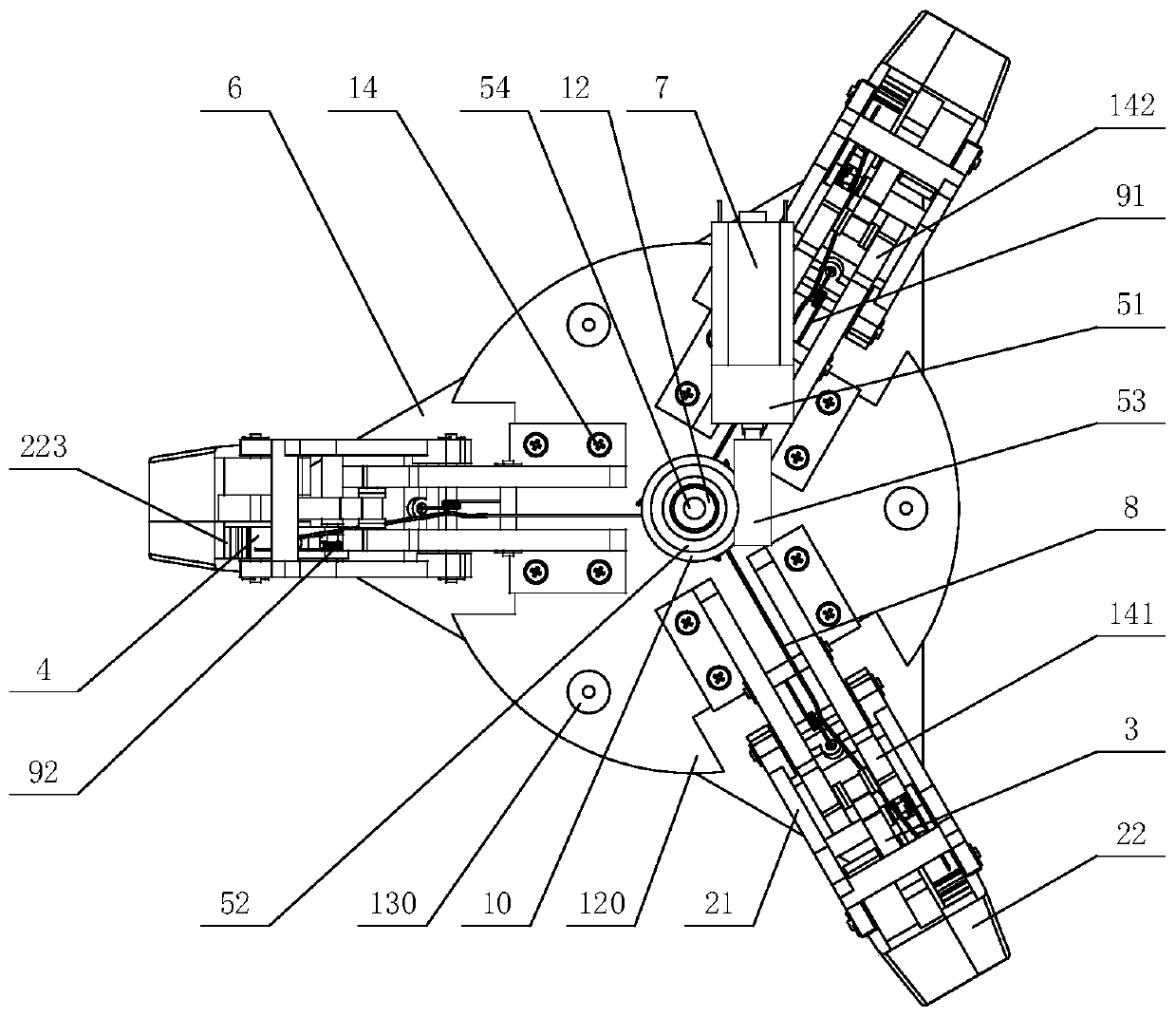
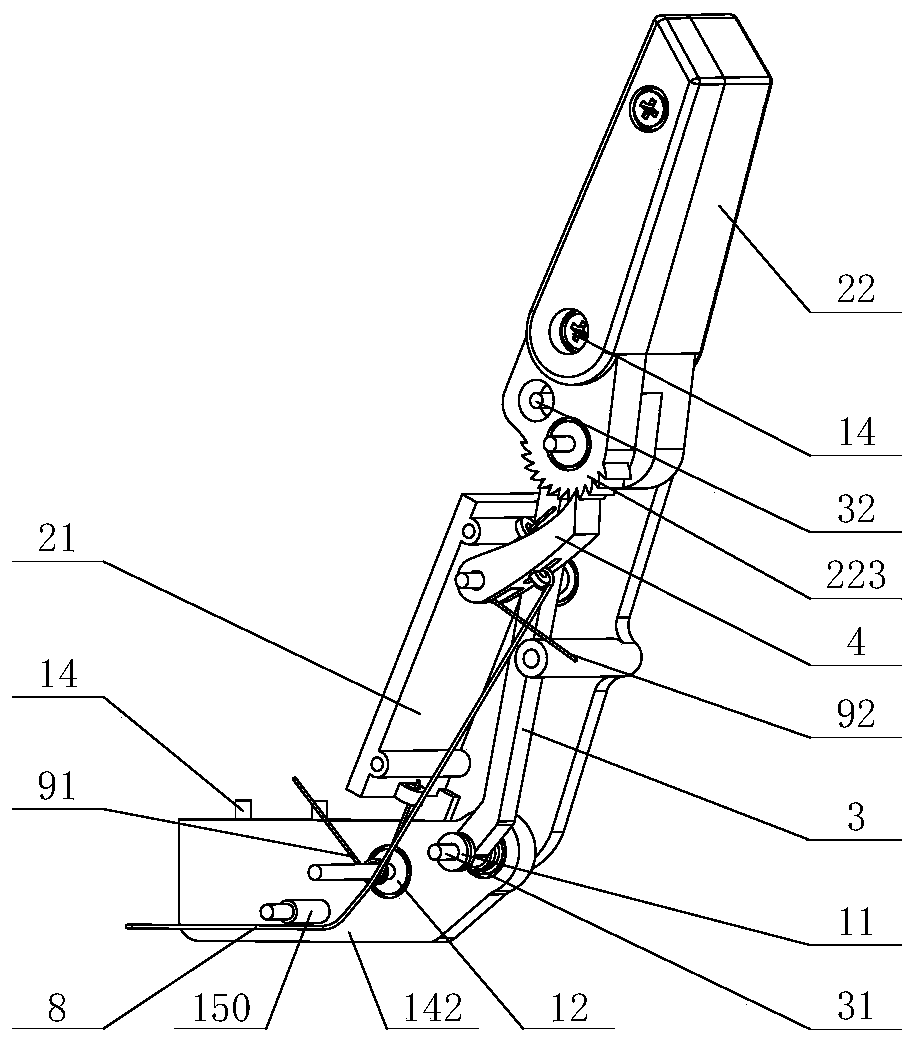
[0034] An embodiment of the flexible palm surface self-adaptive fast grasping robot hand device designed by the present invention, as Figure 1 to Figure 3 As shown, it includes a base 1 , a driver 7 , a transmission mechanism 5 , three fingers 2 , three ratchets 223 , three pawls 4 , a flexible cloth 6 , three first springs 9 and a cord reel 10 . The driver 7 is fixedly connected to the base 1; the input end of the transmission mechanism is connected to the output end of the driver; the base 1 includes a base lower plate 110, a base upper plate 120, three support columns 130, three A support 140, three wire shafts 150; each said support includes a left side support 141 and a right side support 142, all fixedly connected with the upper plate of the base; The seat upper plate 120 and the base low...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More