

Seamless autonomous navigation algorithm for small UAV based on topocentric coordinate system
A technology of small drones and navigation algorithms, which is applied in the field of seamless autonomous navigation algorithms for small drones, can solve the problem of slowly diverging positioning errors, and achieve effective and reliable data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0102] The present invention will be described in detail in conjunction with accompanying drawing now. This figure is a simplified schematic diagram only illustrating the basic structure of the present invention in a schematic manner, so it only shows the components relevant to the present invention.
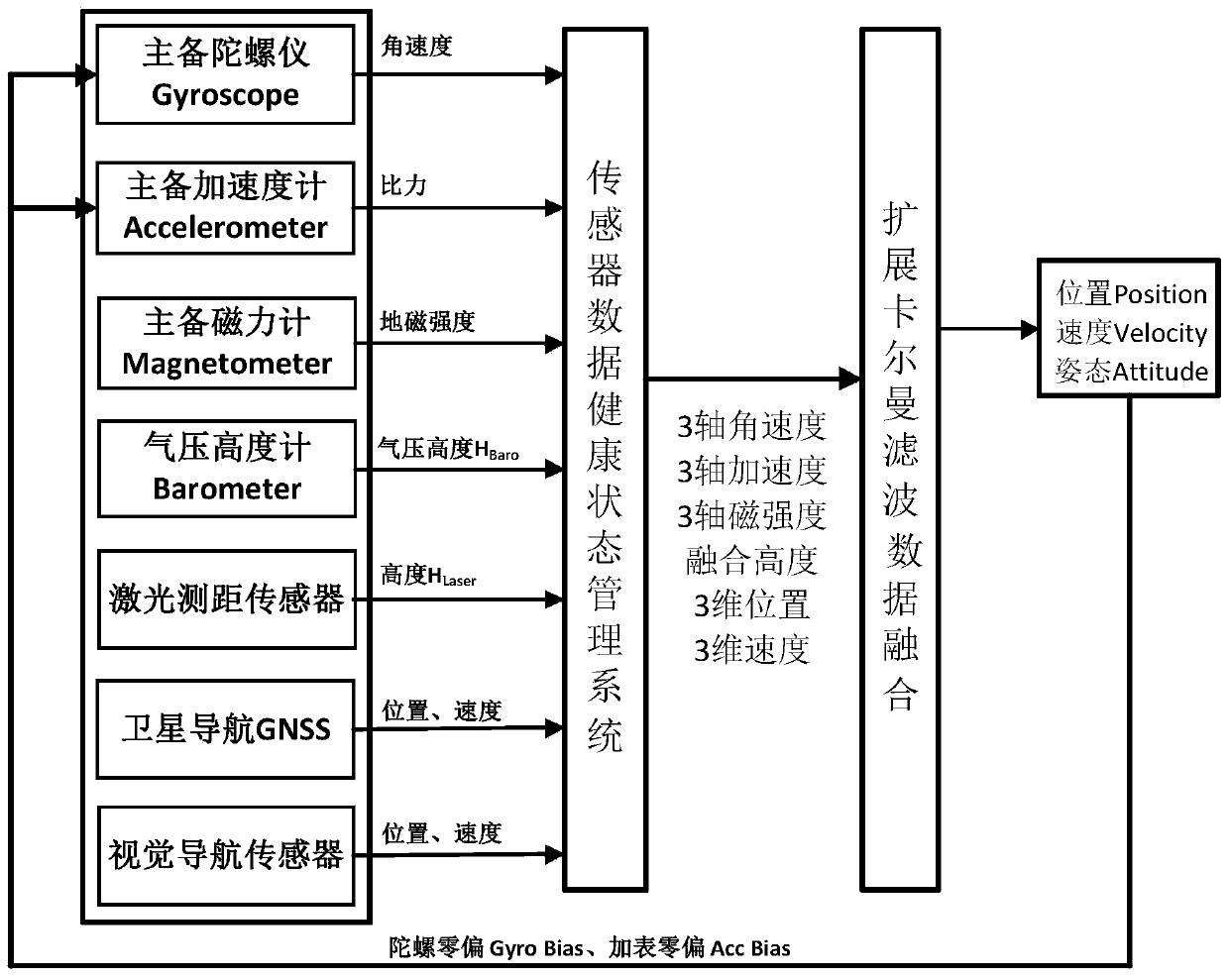
[0103] Such as figure 1 As shown, the navigation system involved in the present invention includes a set of main IMU, main magnetometer and main barometric altimeter, a set of backup IMU, backup magnetometer and backup barometric altimeter, and laser ranging sensor, GNSS and visual navigation sensor, wherein ,
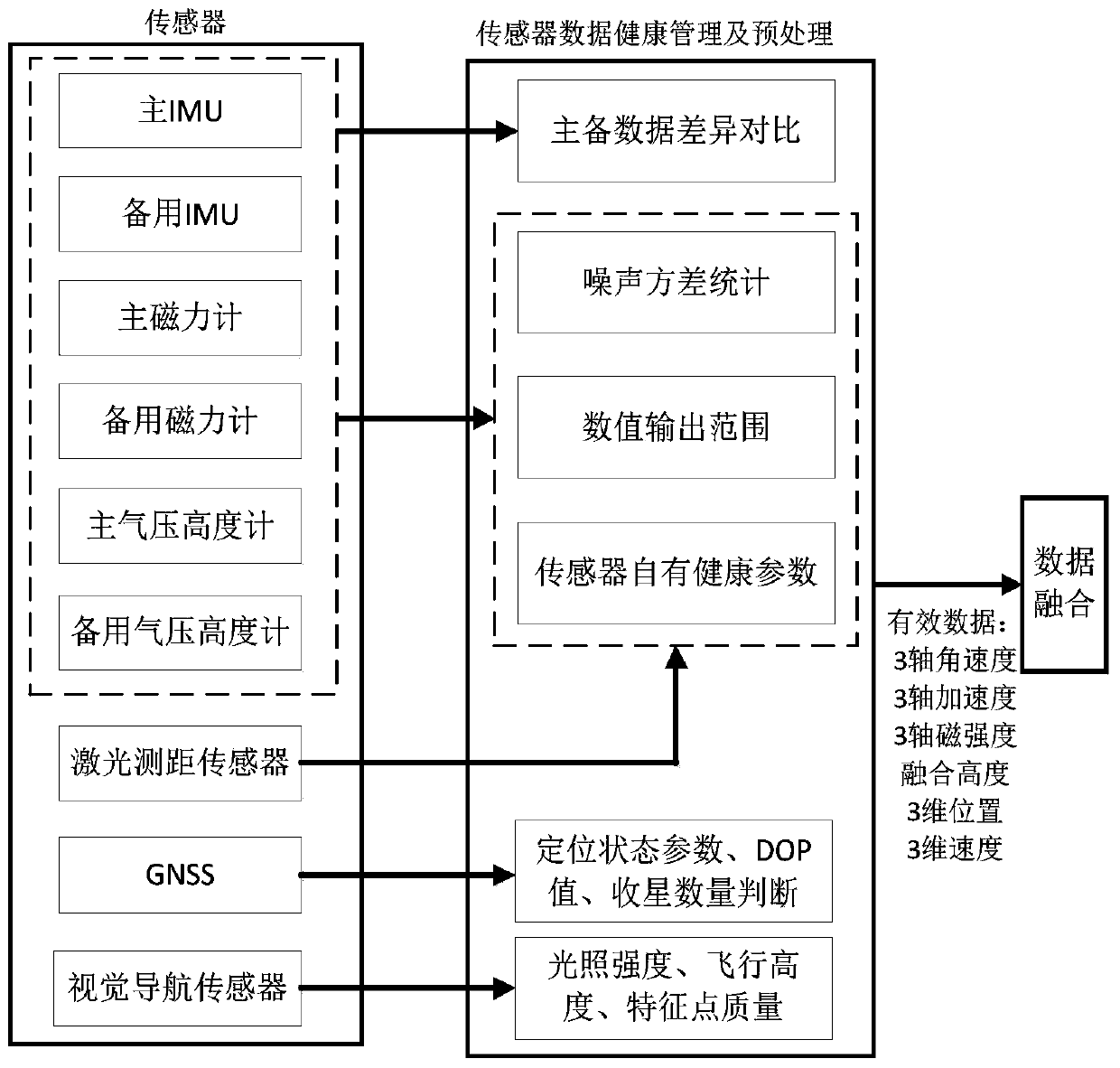
[0104] Among them, the main IMU and the backup IMU both include a three-axis orthogonal gyroscope and a three-axis orthogonal accelerometer, which are used to measure angular velocity and acceleration (specific force), respectively, and can be the same type of sensor, or can be matched in terms of performance; the main IMU Both the magnetometer and the backup magnetome...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More