Online S-type acceleration-deceleration planning method with optimal time
A time-optimized, acceleration and deceleration technology, applied in electrical program control, digital control, etc., can solve problems such as inability to plan trajectory, achieve the effect of intelligent and flexible, simplified solution algorithm, and high real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific implementation examples. It should be understood that the specific implementation examples described here are only used to explain the present invention, and are not intended to limit the present invention.
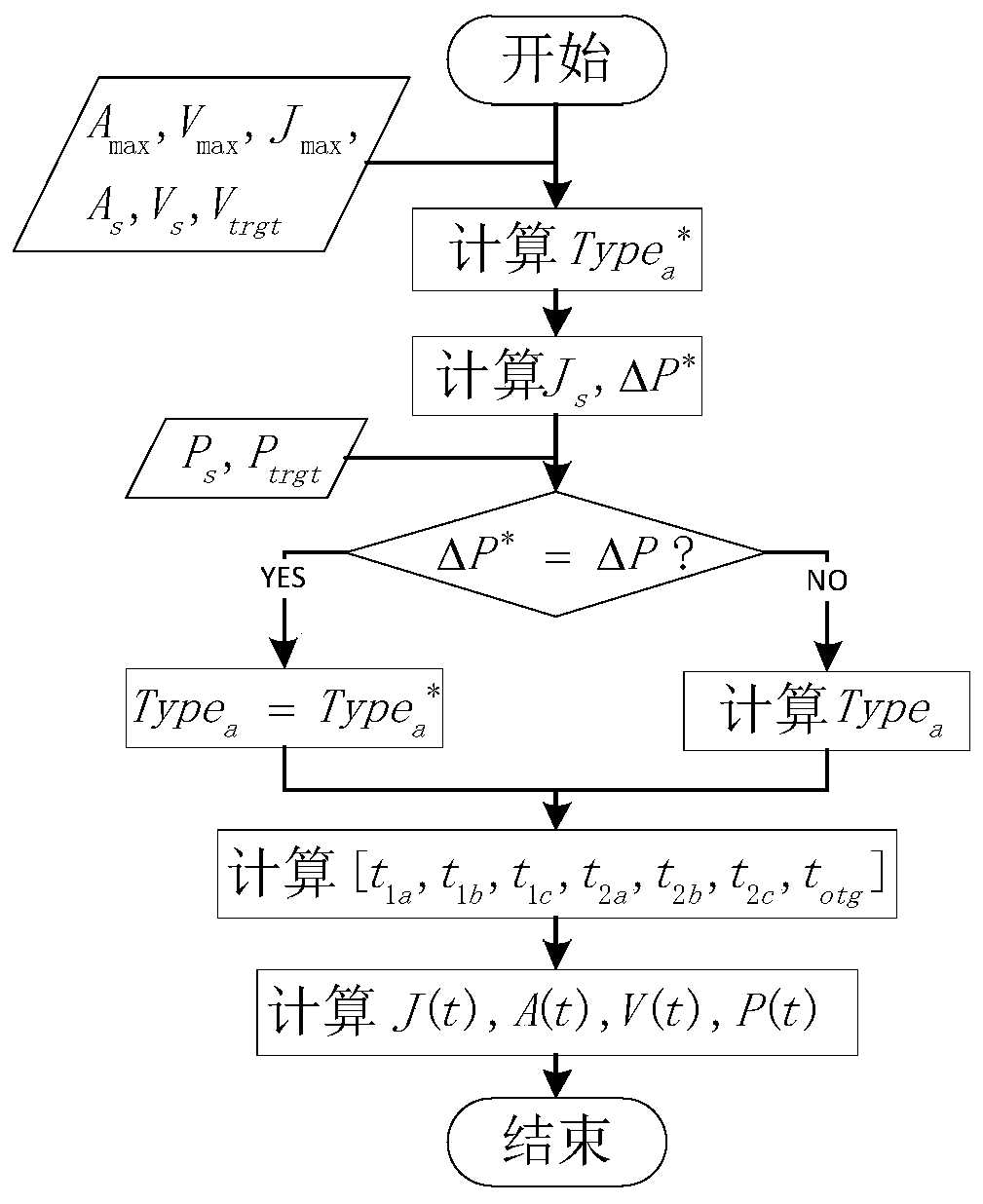
[0034] The linear velocity planning method provided by the invention. Its input parameters include motion constraints, first and last motion states, and interpolation time dt. Motion constraints include maximum jerk, maximum acceleration, and maximum velocity, denoted as (J max , A max , V max ). The initial motion state includes initial acceleration, initial velocity, and initial displacement, denoted as (A s , V s , P s ). The initial motion state should satisfy the actual conditions, otherwise the motion planning may exceed the motion constraints.
[0035] The end motion state includes the target acceleration being zero, the target ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More