

Adaptive robust slip form control method for hybrid robot used for automobile electrophoretic painting transportation
An adaptive robust, electrophoretic coating technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of not considering the boundedness of sliding mode, strong interference and poor anti-interference ability, saturation And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
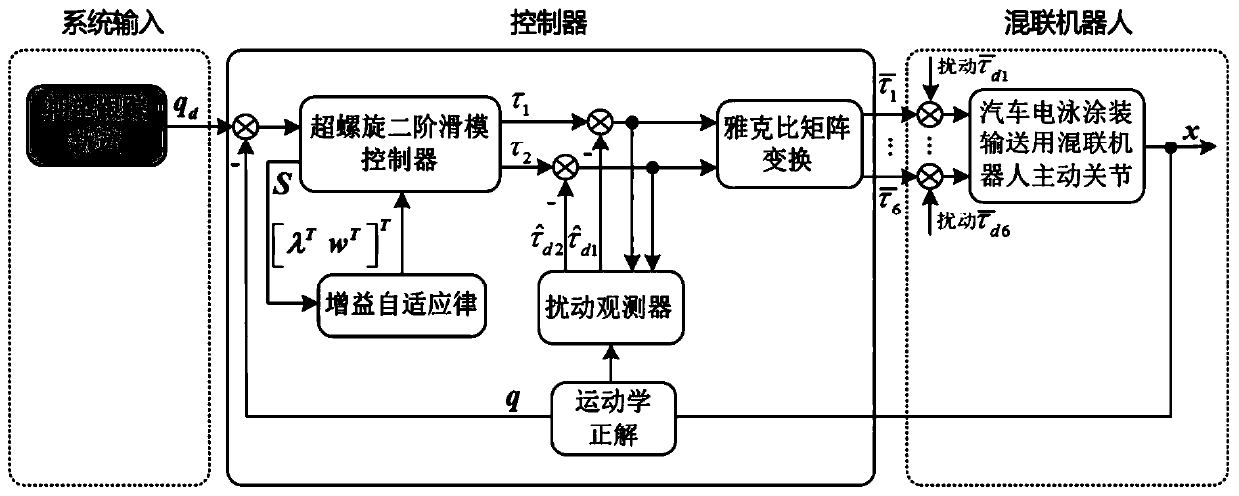
[0118] The present invention mainly focuses on using an adaptive robust sliding mode control method to improve the motion control performance of the hybrid robot for automobile electrophoretic coating transportation. This method can not only enhance the robustness and anti-interference ability of the system, but also can Suppresses chattering in sliding mode control and resolves actuator saturation. The block diagram of the adaptive robust sliding mode control principle of the new hybrid robot for electrophoretic coating transportation is as follows: figure 2 As shown, the specific implementation of the control method is as follows:
[0119] 1. Solve the Jacobian matrix
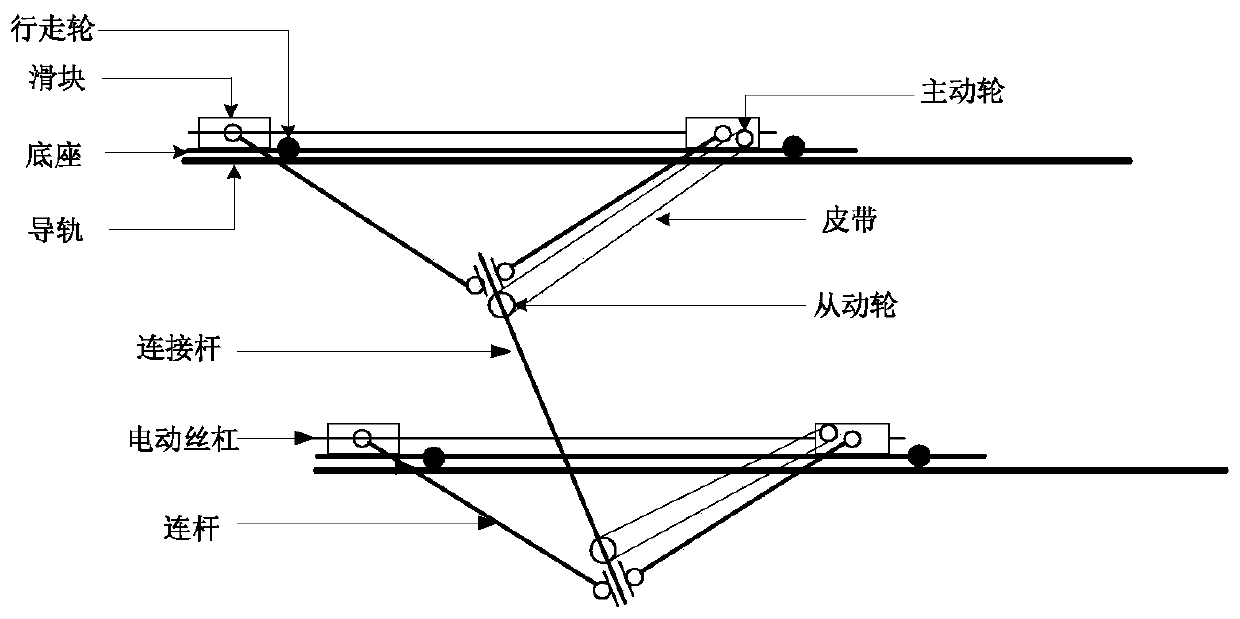
[0120] exist figure 1 In this method, the rod length constraint equation is used, and the kinematics inverse solution equation can be obtained according to the structure of the lifting and turning mechanism:
[0121]
[0122] In the formula, z i (i=1,2), β i (i=1, 2) are respectively figure 1 The z-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More