Vehicle navigation trail point offset correction method based on Kalman filtering
A Kalman filter and vehicle navigation technology, applied in the field of route navigation planning, can solve the problems of not being able to accurately know the user's driving trajectory, affecting the research on the characteristics of the navigation trajectory, and the deviation of the trajectory points from the actual position, etc., to achieve real-time processing, high availability, and data The effect of small storage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
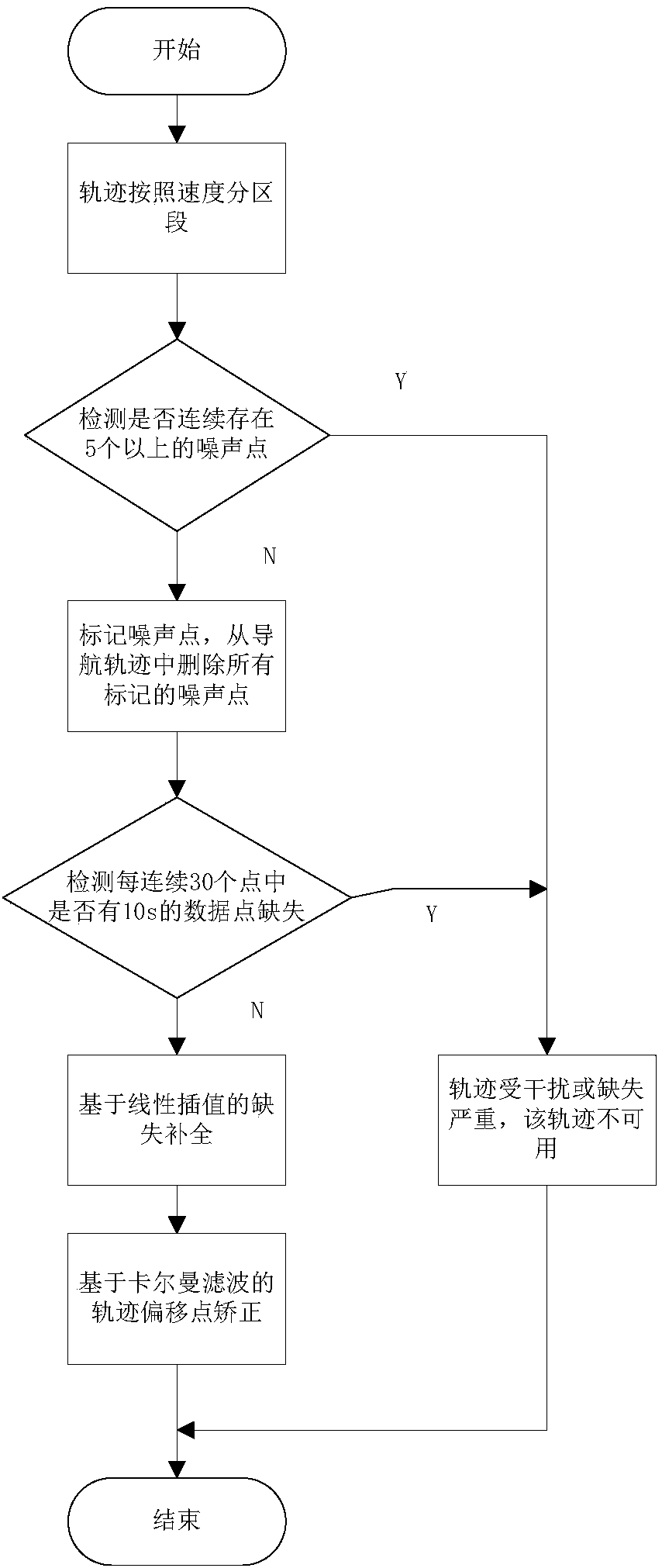
[0055] A Kalman filter-based offset correction method for vehicle navigation track points, the specific process is as follows figure 1 shown. It mainly includes the following steps:
[0056] Step 1: Denoise the track points in the navigation track;
[0057] The process of denoising the track points in the navigation track is as follows:
[0058] Step 1.1: divide the track points in the navigation track into speed segments;
[0059] In the navigation track, the section where the continuous track points belonging to the same speed section are divided into speed sections, and each speed section includes at least 5 continuous track points;
[0060] Track point speed section includes low speed section [0~10)m / s, medium speed section [20~30)m / s, high speed section [0~10m / s;
[0061] The final speed division effect obtained is as follows: figure 2 shown.
[0062] Step 1.2: Calculate the distance between adjacent track points in each speed section, and judge whether the distanc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



