Shielded vegetable and fruit harvesting method based on depth association perception algorithm
A harvesting method and algorithm technology, applied in the field of image processing, can solve the problems of low picking success rate, long time for fruits and vegetables to ripen, difficult to be widely used, etc., achieve the goal of simplifying the training process, simple training, and improving the success rate of harvesting Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
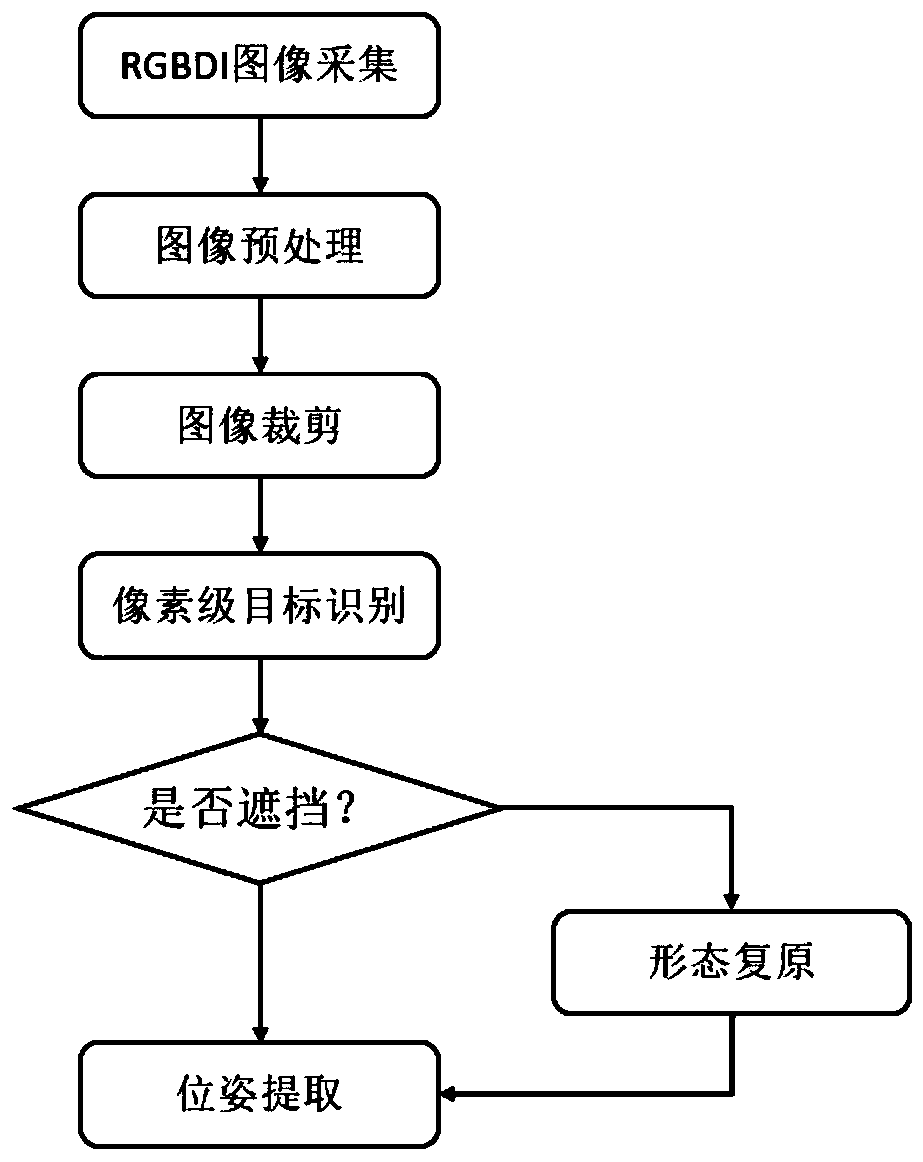
[0041] Such as figure 1 As shown, the present invention provides a method for harvesting fruits and vegetables based on depth associative perception algorithm, including:
[0042] Image collection step: collecting RGB channel color images, D channel depth images and I channel infrared images;
[0043] Preprocessing step: Unify the resolution of the collected images and remove image noise;
[0044] Image clipping step: calculate the real coordinates of each point in the image, and remove the area outsi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More