Split type super high-rise full-automatic fire extinguishment robot and control method thereof
A technology of a fire-fighting robot and a control method, which is applied in the field of a split-type super-high-rise fully automatic fire-fighting robot and its control, can solve the problems of high cost, high cost of fire trucks, complicated design process of high-rise aerial ladders, etc., and achieve the effect of reducing the load of the aerial ladder
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific embodiments provided by the present invention will be described in detail below in conjunction with the accompanying drawings.
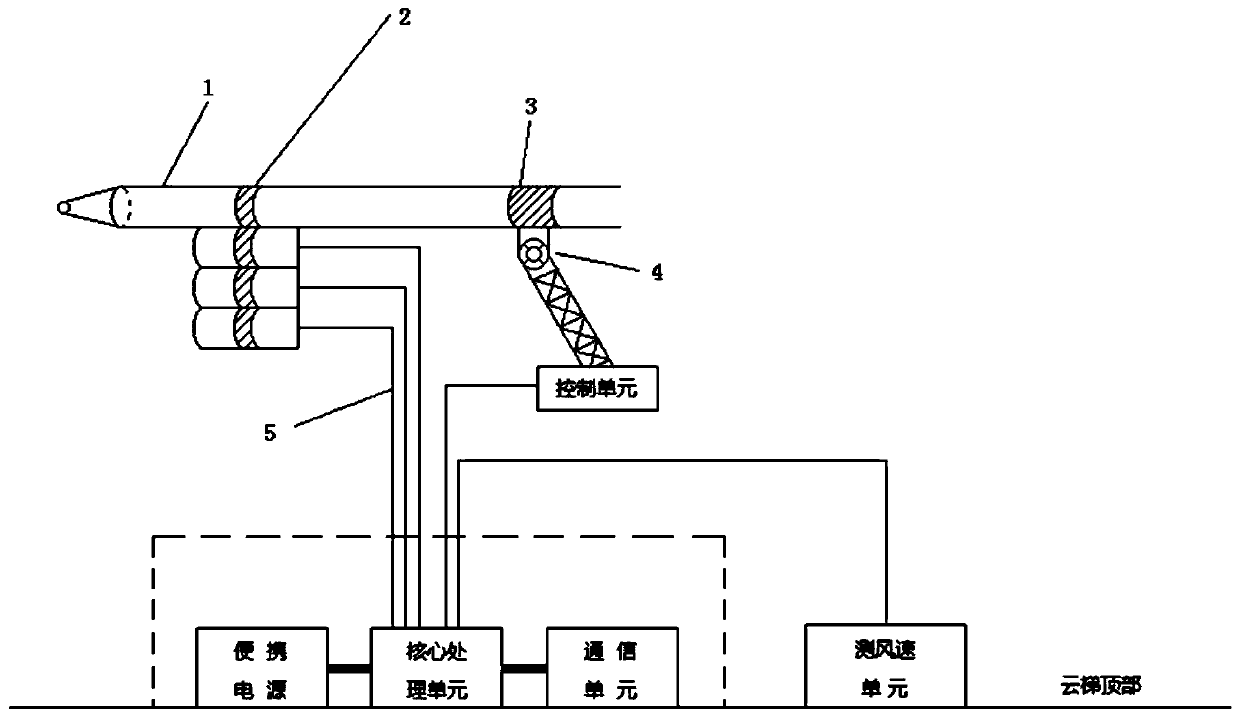
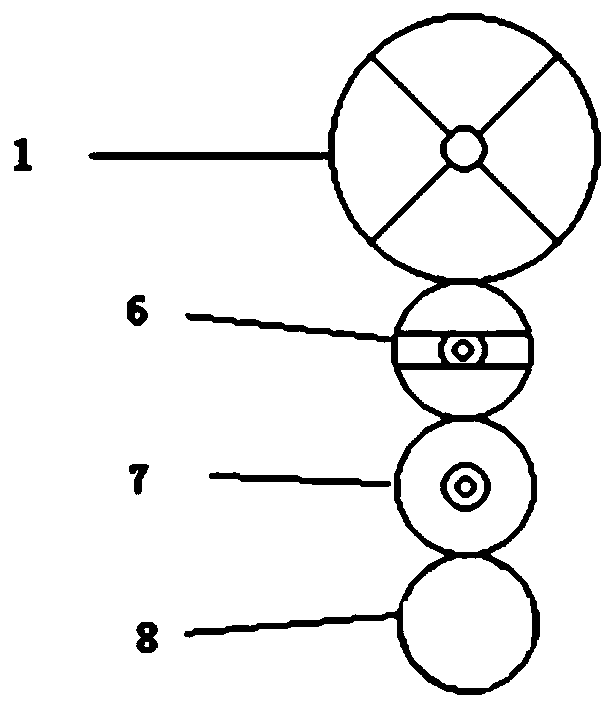
[0027] A split super high-rise fully automatic fire extinguishing robot, such as Figure 1-2 As shown, the robot adopts a split structure design, including a thermal imaging unit 7 placed on the top of the fire ladder, an image acquisition unit 6, an information detection unit, a remote wireless communication unit, an information analysis and processing unit, and a fire truck driving unit. An indoor command execution unit; the information detection unit includes a distance measuring unit 8 and an anemometer unit.
[0028]The split-type super-high-rise fully automatic fire-fighting robot realizes the full automatic processing of image acquisition (including CCD image and infrared image), distance and wind speed detection, wireless communication, analysis and processing, and instruction execution, in which thermal imaging unit 7, im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com