

SCARA robot dynamic parameter identification method based on maximum likelihood estimation
A technology of maximum likelihood estimation and dynamic parameters, which is applied to instruments, adaptive control, control/regulation systems, etc. It can solve problems such as low accuracy, achieve high-precision identification, improve signal-to-noise ratio, and simple operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
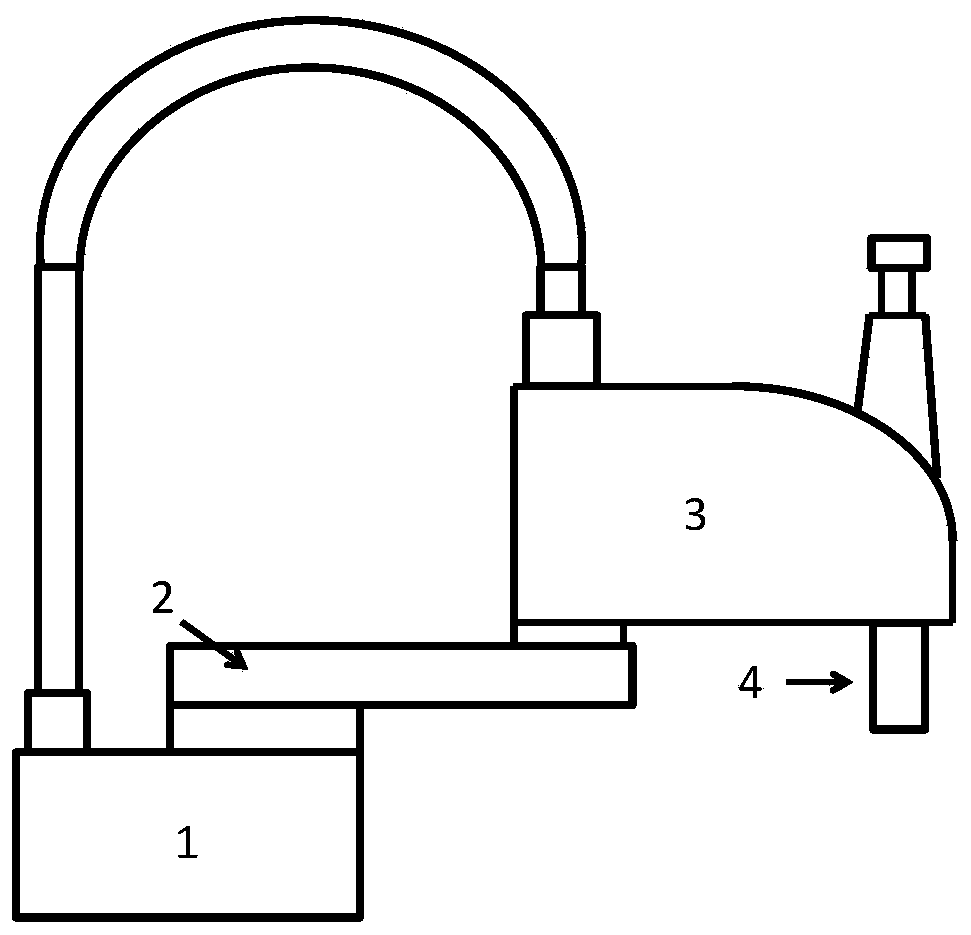
[0049] Such as figure 1 Shown embodiment is a kind of SCARA robot dynamics parameter identification method based on maximum likelihood estimation, comprises SCARA robot, robot controller, computer; Computer is connected with robot controller, and SCARA robot is connected with robot controller; Include as follows step:
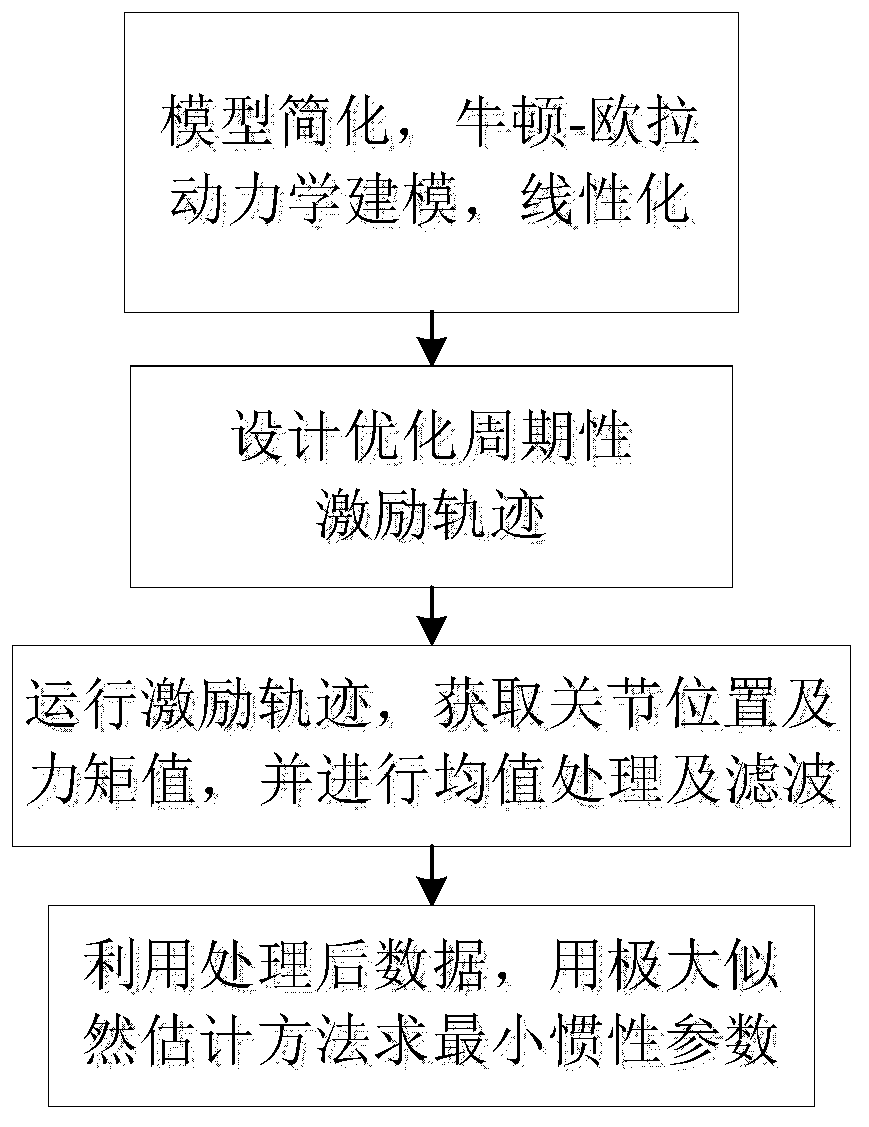
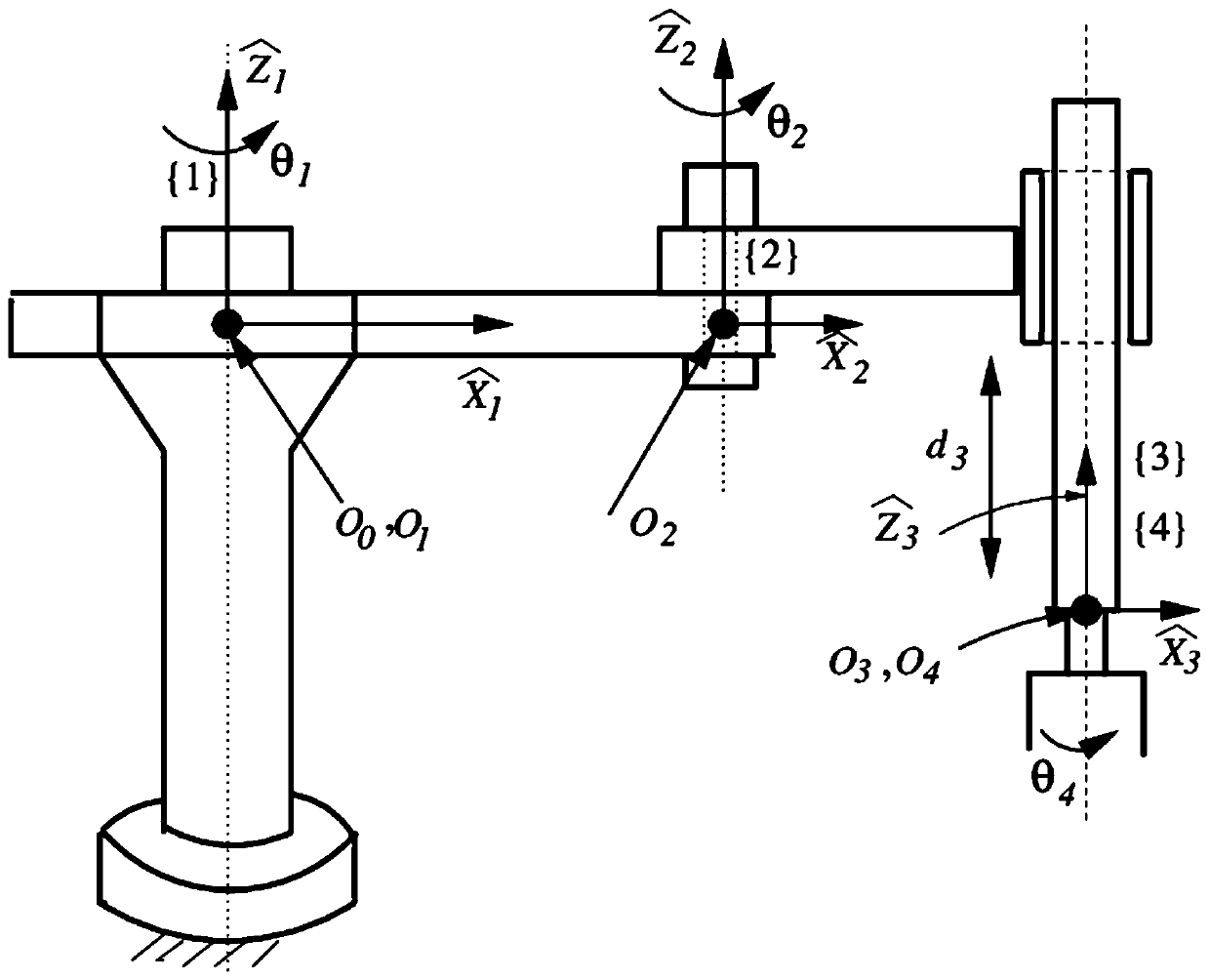
[0050] Step 110: Using the Newton-Euler method, introducing the coefficient of frictional force and the moment of inertia of the motor, establishing the dynamic equation of the SCARA robot,
[0051]
[0052] In the formula: τ is the n×1 joint torque vector; q, are the n×1 joint position, velocity and acceleration vectors; M(q) is the n×n mass matrix, is n×1 centrifugal force and Gothic force vector; G(q) is n×1 gravity vector; f c is the Coulomb friction coefficient, f v is the viscous friction coefficient, the followi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More