

Laser radar road edge sensing system of intelligent driving electric sweeper
A laser radar and perception system technology, applied in the field of laser radar roadside perception system, can solve the problems of visual sensors relying on the lighting environment, difficulty in ensuring the accuracy of results, and consuming large processor resources, so as to reduce perception blind spots and efficiently clean tasks , the effect of reducing storage and computing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
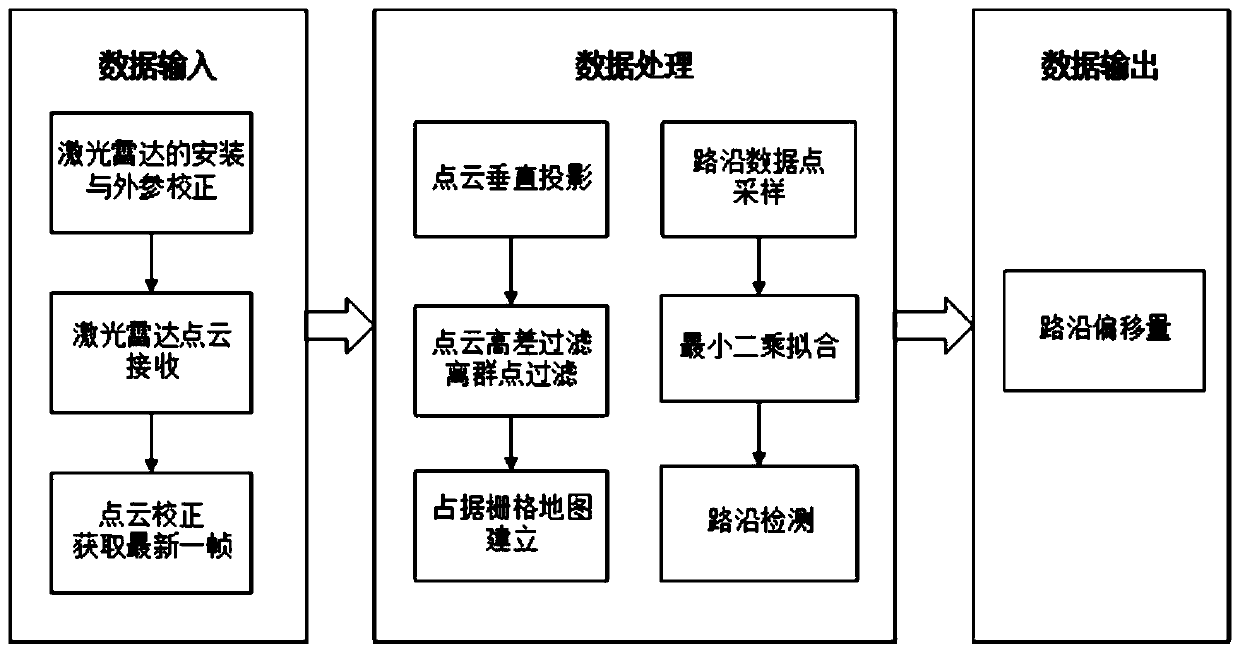
[0031] Such as figure 1 Shown is a schematic diagram of the overall system architecture of the corresponding embodiment of the technical solution of the present invention, including:
[0032] Sweeper: It is used as the carrier platform of the entire roadside perception system and completes its own tracking control according to the roadside offset obtained by the data processing module. It has a built-in data processing module, and the sweeper is also equipped with a double-sided laser radar sensor;
[0033] Data processing module: it is built in the sweeper and connected to the bilateral lidar sensors, used to receive the radar data packets sent from the bilateral lidar sensors and transmit the offset of the road edge to the sweeper after multi-link data processing To complete the self-tracking control of the sweeper;
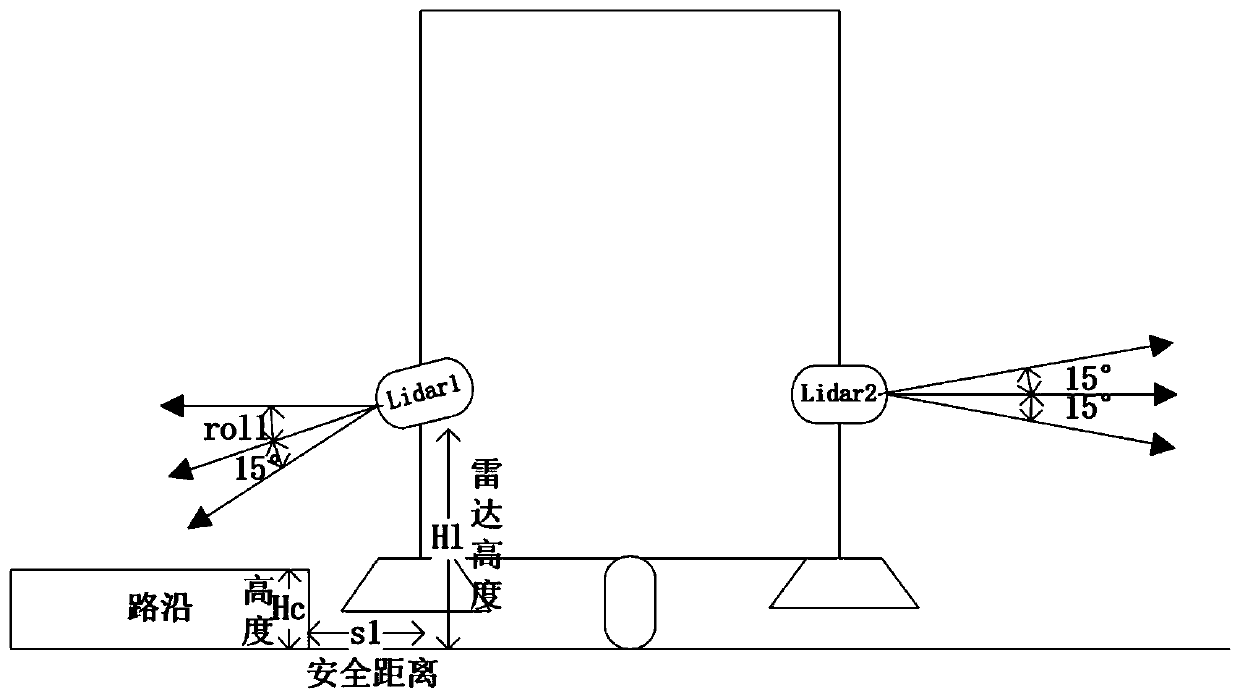
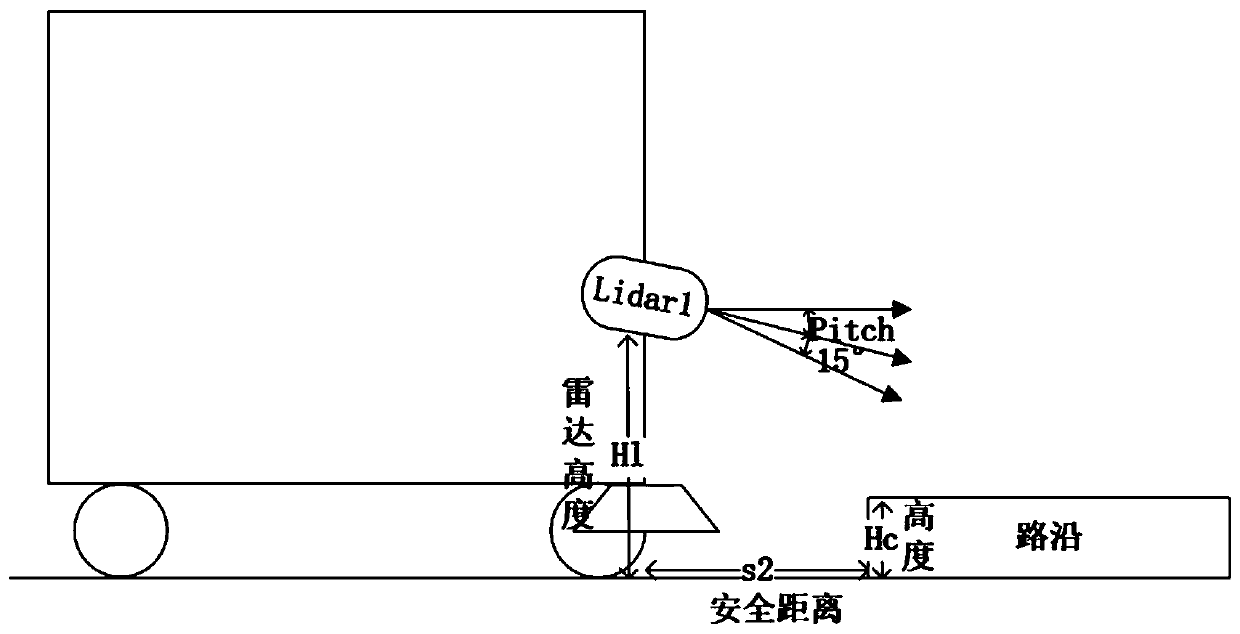
[0034] Bilateral lidar sensor: installed on the sweeper and connected to the data processing module, used to obtain real-time environment and roadside relate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More