Robot indoor navigation control method
A control method and indoor navigation technology, applied in the field of robotics, can solve problems such as inaccurate route planning of the indoor navigation system of robots, and achieve the effects of reducing computing burden, improving accuracy, and improving operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will clearly and completely describe the technical solutions in the embodiments of the application with reference to the drawings in the embodiments of the application. Apparently, the described embodiments are only some of the embodiments of the application, not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
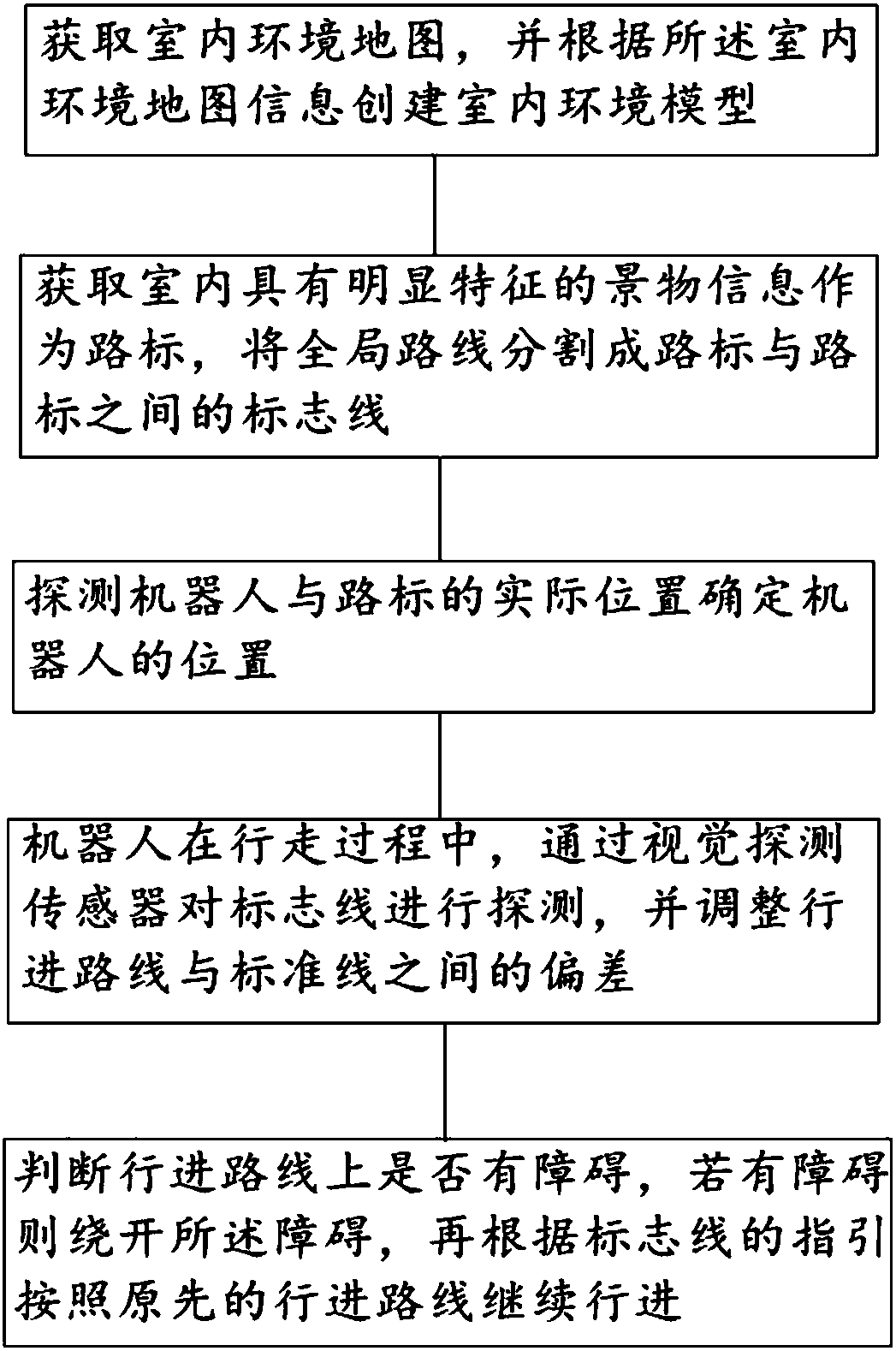
[0024] Please see figure 1 , figure 1 It is a schematic flowchart of a specific embodiment of the indoor navigation control method for a robot provided by the present invention.
[0025] like figure 1 As shown, the present invention provides a method for controlling indoor navigation of a robot, and the method for controlling indoor navigation of a robot includes the following steps:
[0026] Obtaining an indoor environment map, and creating an indoor environment model according ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap