

Independent suspension structure of Mecanum wheel omni-directional mobile robot
An independent suspension and suspension technology, which is applied in the field of intelligent robots, can solve the problems of insufficient shock absorption, left and right tilt of the mecanum wheel, wheel damage, etc., and achieve the effect of stable robot movement, weakened up and down jump, and reduced up and down jump
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manners of the present invention will be further described below with reference to the accompanying drawings.
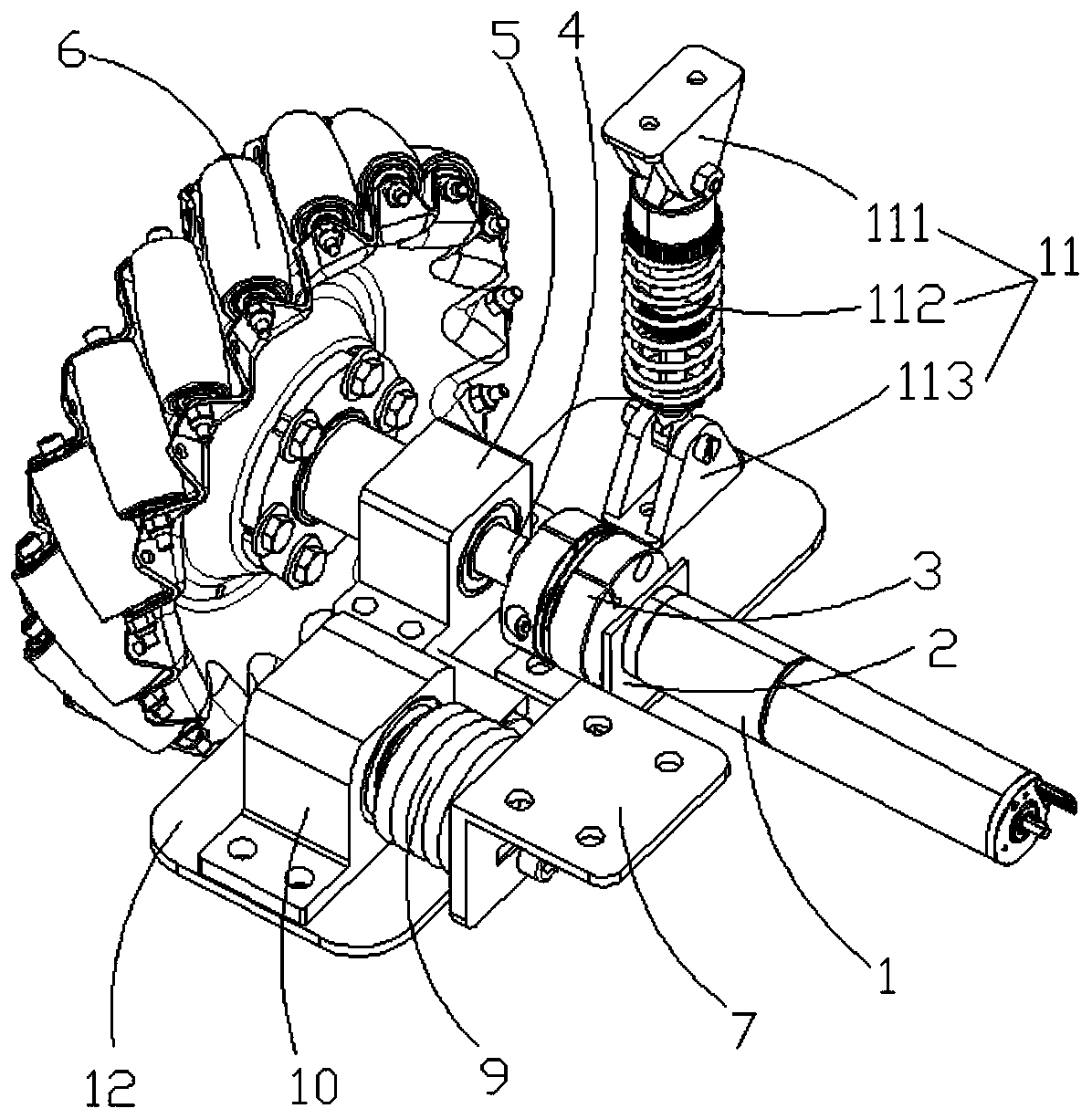
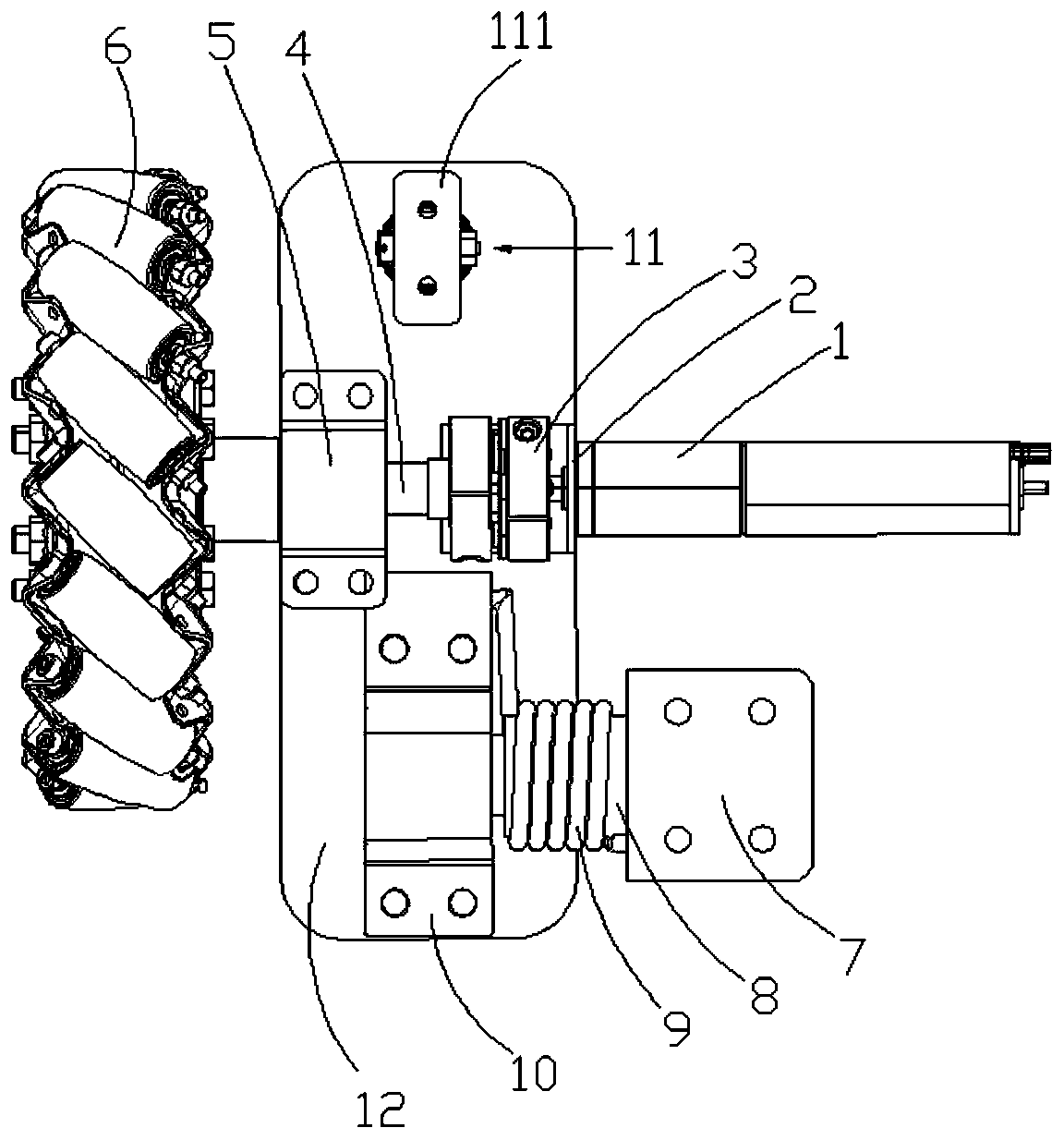
[0030] Such as figure 1 with figure 2 As shown, an independent suspension structure of a mecanum wheel omnidirectional mobile robot includes a suspension base plate 12 on which a motor reducer 1, an L-shaped support 2, a shaft coupling 3, Output shaft 4, axle shaft bearing housing 5 and torsion spring shaft bearing housing 10. An axle bearing is installed in the axle bearing seat, the output shaft 4 is fixed on the suspension base plate 12 through the axle bearing seat and the axle bearing, and the motor reducer 1 is connected to the One end of the output shaft 4 is connected, the other end of the output shaft 4 is fixedly connected with a mecanum wheel 6, and the motor reducer 1 is fixed on the suspension base plate 12 through the L-shaped support 2;
[0031] The suspension base plate 12 is also equipped with a shock absorber 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More