

Dynamic scene visual positioning method based on image semantic segmentation
A technology for semantic segmentation and dynamic scenes, which is applied in image analysis, image data processing, instruments, etc., can solve the problem of positioning accuracy and robustness to be improved, and achieves improved positioning accuracy and robustness, improved positioning accuracy, and improved positioning accuracy. Excellent results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
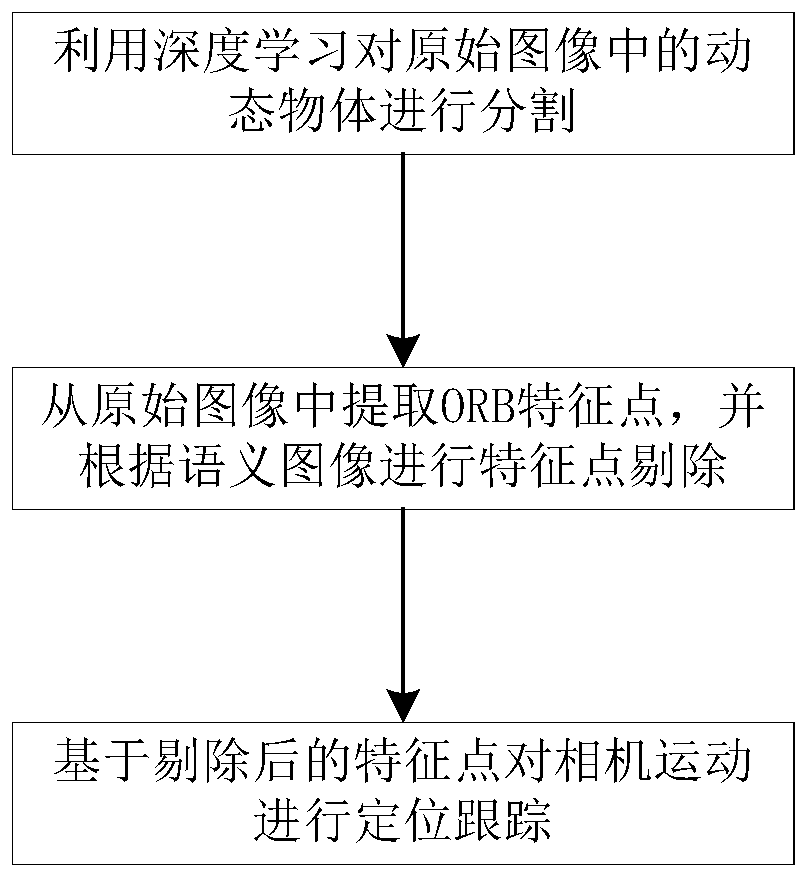
Method used
Image

Examples
Embodiment 1
[0081] The present invention is evaluated using Frankfurt monocular image sequences, which are part of the Cityscapes dataset. The entire Frankfurt sequence provides more than 100,000 frames of outdoor environment images and provides ground-truth localization results. Divide the sequence into several smaller sequences containing 1300-2500 frames of sequences of dynamic objects such as driving cars or pedestrians. The configuration of the experimental platform is: Intel XeonE5-2690V4; 128GB RAM; NVIDIA TitanVGPU.
[0082] The sequence isolated from the original Frankfurt sequence is as follows:
[0083] Seq.01:frankfurt_000001_054140_leftImg8bit.png-frankfurt_000001_056555_leftImg8bit.png
[0084] Seq.02:frankfurt_000001_012745_leftImg8bit.png-frankfurt_000001_014100_leftImg8bit.png
[0085] Seq.03:frankfurt_000001_003311_leftImg8bit.png-frankfurt_000001_005555_leftImg8bit.png
[0086] Seq.04:frankfurt_000001_010580_leftImg8bit.png-frankfurt_000001_012739_leftImg8bit.png
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More