Haptic regeneration exoskeleton structure and UAV flight attitude control method
An exoskeleton, tactile technology, applied in attitude control, non-electric variable control, control/adjustment system, etc., can solve the problems of signal interference, reduce flexibility, noise, etc., to reduce fatigue, reduce fatigue strength, improve The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
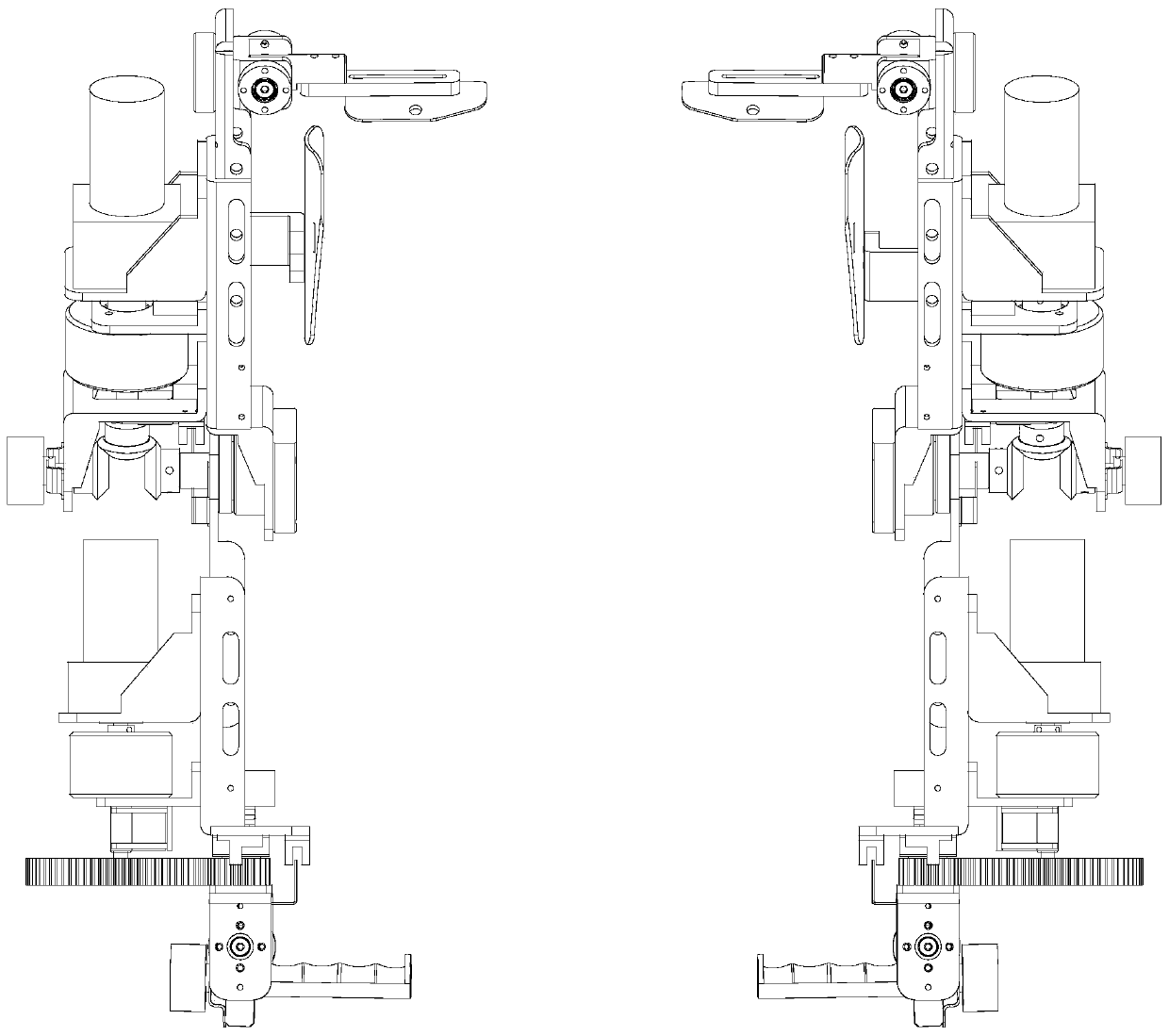
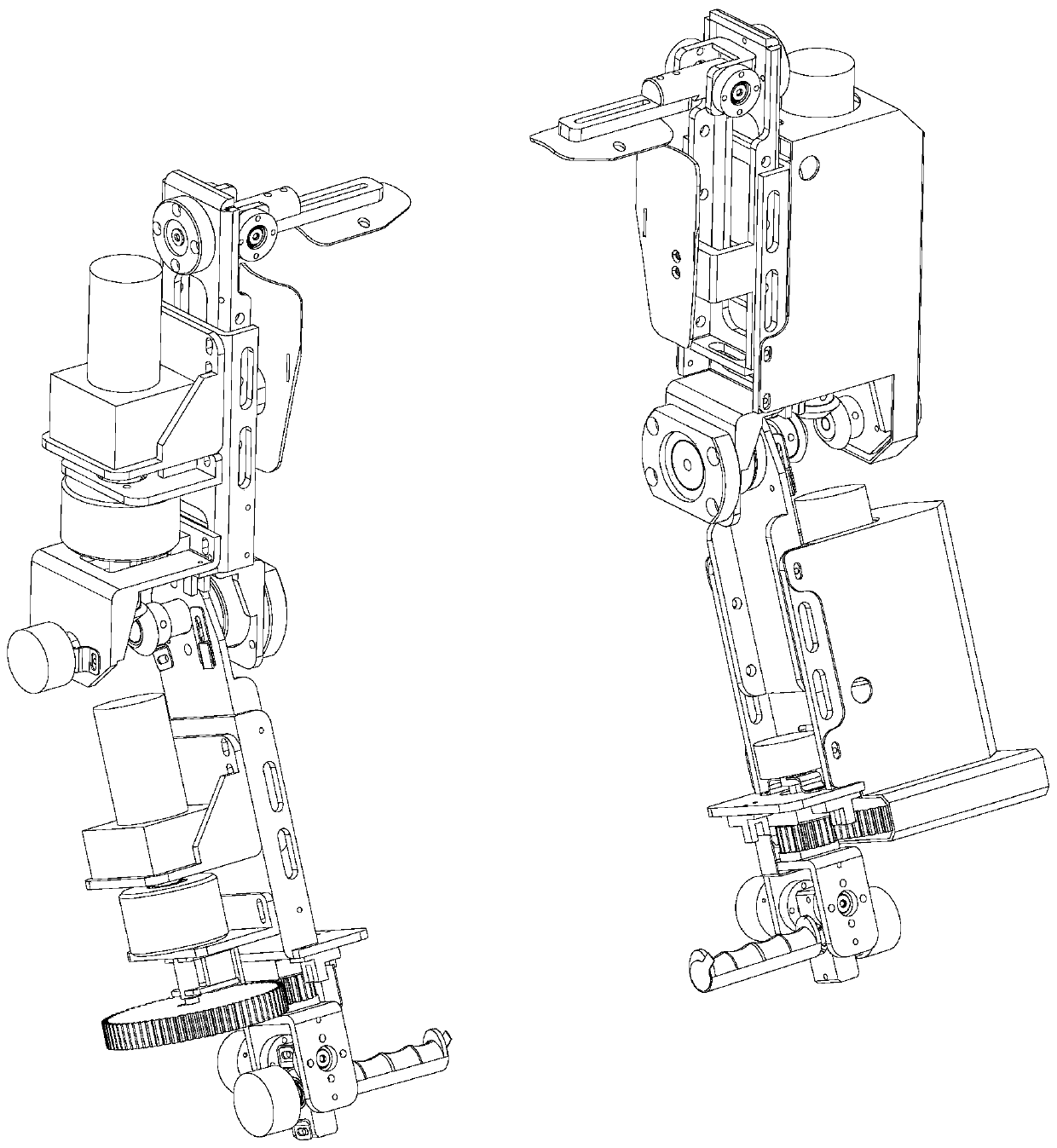
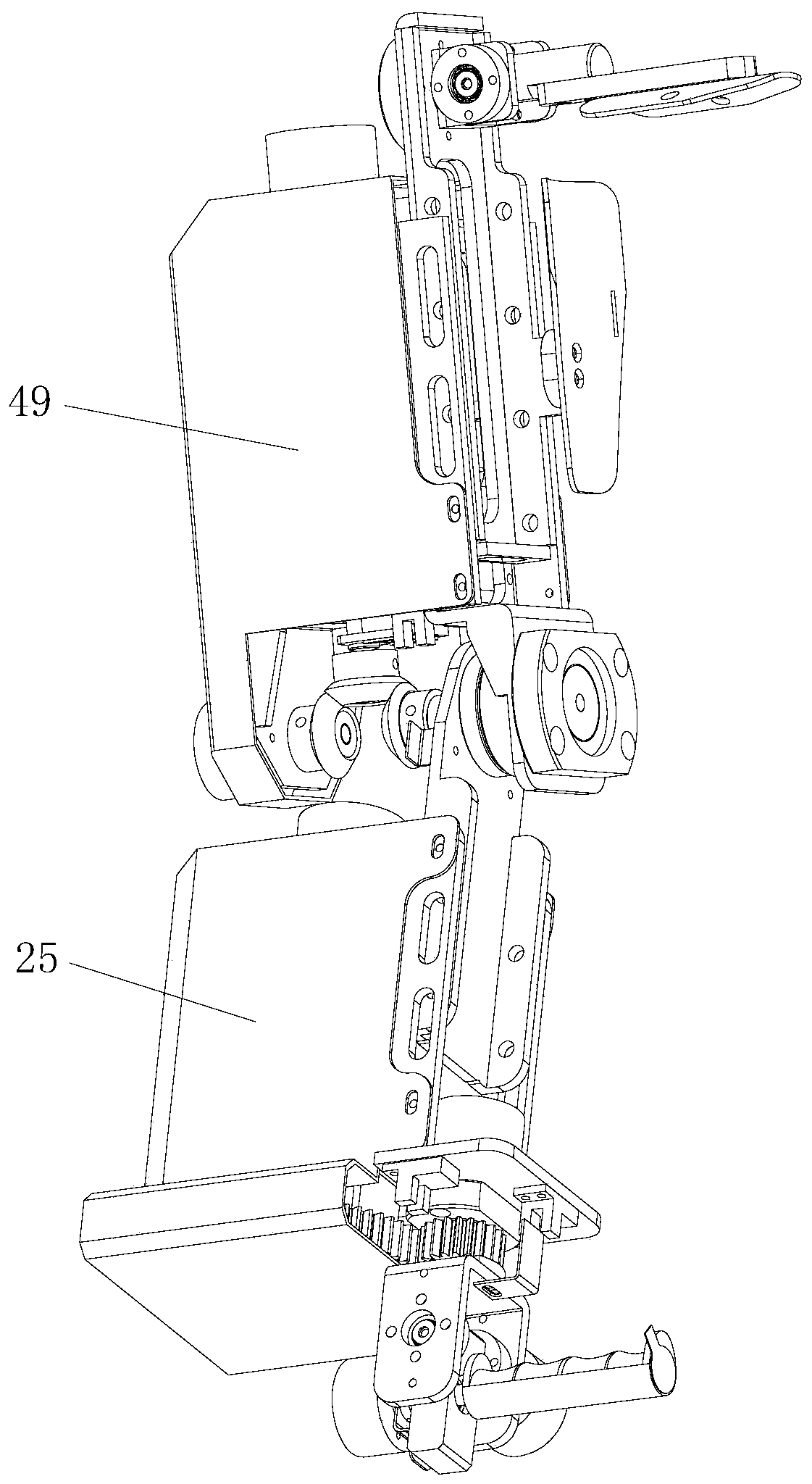
[0060] combine Figure 1 to Figure 14 As shown, this embodiment discloses a force-tactile regenerative exoskeleton structure and a method for controlling the flight attitude of a UAV, such as figure 1 As shown, it includes a back connection module, a shoulder joint mechanism, an upper arm, an elbow joint movement mechanism, a forearm, and a wrist joint movement mechanism, which are respectively worn on the back, shoulder, upper arm, elbow, forearm and wrist of the human body.
[0061] Wrist joint includes flexible pressure sensor 1, hand grip 2, wrist joint bearing seat 3, hand grip shaft 4, link block 5, wrist joint hollow shaft encoder 6, rotation fixing plate 7, wrist joint bearing pad 8, front shaft 9 , Wrist joint deep groove ball bearing 10, rotating shaft 11, pinion gear 12, large gear 13, wrist joint photoelectric switch 14, wrist joint induction piece 15, 6802 double trimming compact flange 16.
[0062] The forearm includes forearm pressure strain gauge 17, forearm h...
Embodiment 2
[0085] This embodiment discloses a force-tactile regenerative exoskeleton structure and a method for controlling the flight attitude of a drone, so as to solve the problems raised in the above-mentioned background technology. By defining the movement of the exoskeleton elbow, forearm and wrist, the collected signals are transmitted to the slave drone to realize remote control. In terms of tactile regeneration design, the exoskeleton mechanism adopts the motor motion assistance method to establish the relationship between the drone’s safe flight level (the spatial position relationship between the drone and the obstacle) and the motor’s output upper limb motion assistance force (the motor drives the external skeletal movement). When the UAV encounters an obstacle in flight, the spatial position signal is converted into an electrical signal, and then the corresponding electrical signal is fed back to the motor, and the motor reverses (the spatial position relationship between th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More