

Method and system for determining clustering parameters for generating map lane lines
A determination method and technology for generating maps, which are applied in geographic information databases, road network navigators, structured data retrieval, etc., can solve problems such as unfavorable automatic generation of high-precision maps.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
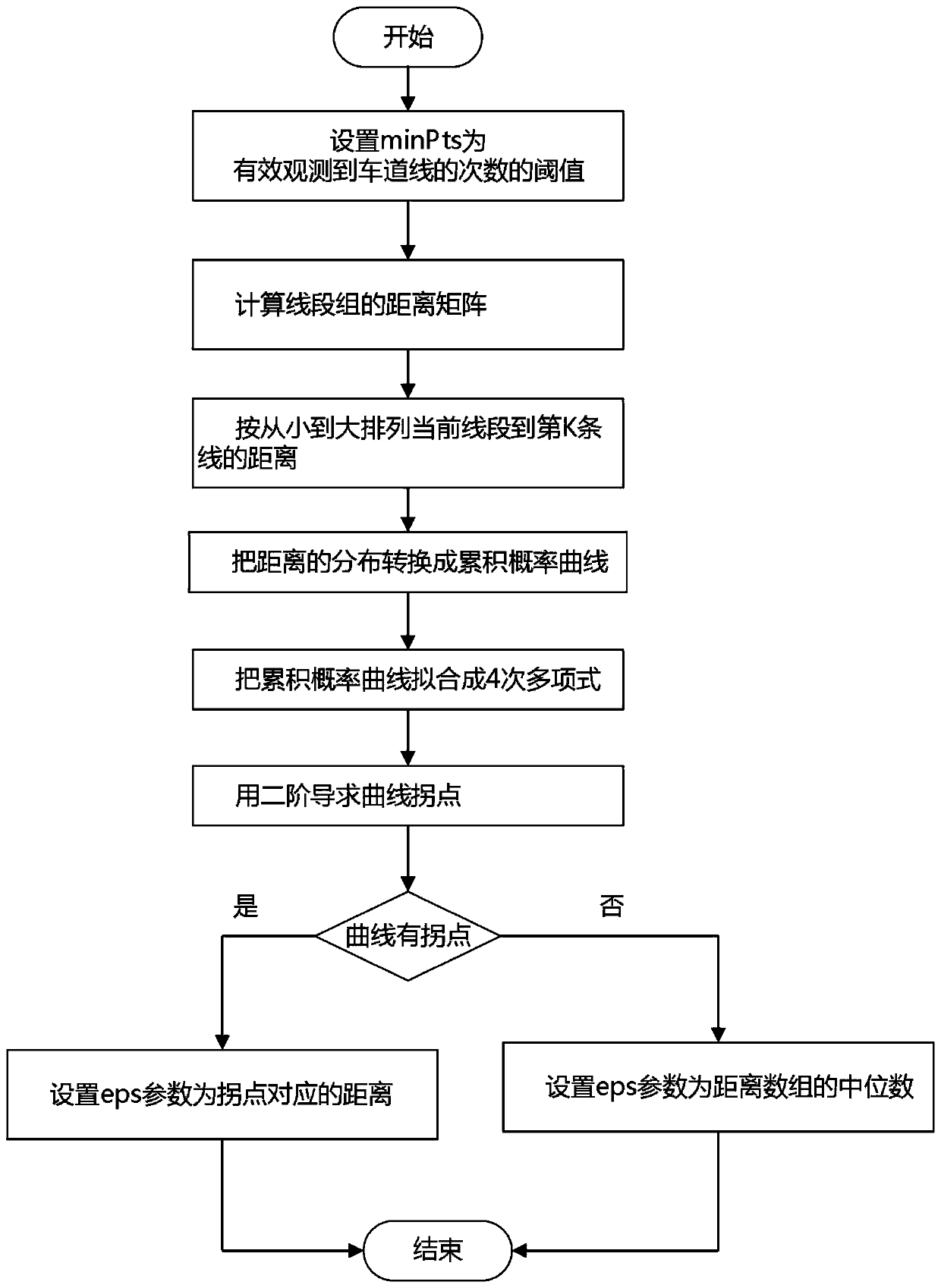
[0049] Embodiment 1 provided by the present invention is an embodiment of a method for determining clustering parameters for generating map lane lines provided by the present invention, the clustering parameters determined in this embodiment include the minimum number and density of core points in the radius area Radius parameter for clustering. Such as figure 2 Shown is a flow chart of an embodiment of a method for determining clustering parameters for generating map lane lines provided by the present invention.
[0050] Step 1, set the value minPts of the minimum number of core points in the radius area, and determine the array of distances from each line segment in the lane line used for clustering to the nearest kth line segment, where k=minPts-1.
[0051] Among them, the value minPts of the minimum number of core points in the radius area set in step 1 is the number of effectively observed lane lines. For example, if the lane line is effectively observed 4 times, it is...
Embodiment 2
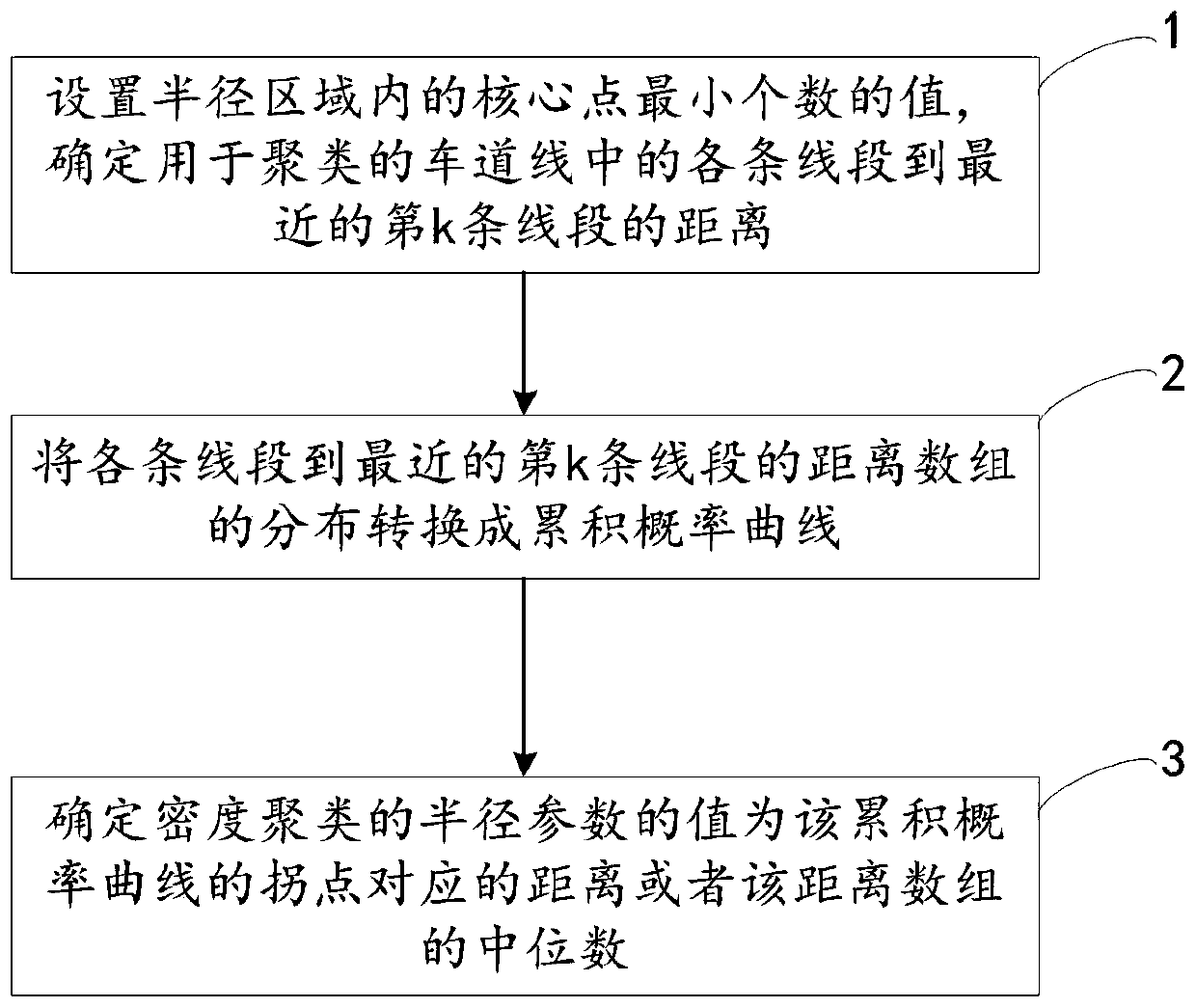
[0083] Embodiment 2 provided by the present invention is an embodiment of a system for determining clustering parameters for generating map lane lines provided by the present invention, such as Figure 7 Shown is a structural block diagram of a system for determining clustering parameters for generating map lane lines provided by the present invention, consisting of Figure 7 It can be seen that the clustering parameters determined by the system include radius parameters of density clustering, and the system includes: the determining system includes: a distance array determination module 1 , a cumulative probability curve conversion module 2 and a clustering parameter determination module 3 .
[0084] The distance array determination module 1 is used to set the value minPts of the minimum number of core points in the radius area, and determines the distance array from each line segment in the lane line for clustering to the nearest k line segment, where k= minPts-1.
[0085] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More