

Torque distribution control system for considering coordination of maneuverability and wheel stability, and method
A torque distribution and control system technology, applied in the direction of control drive, electric vehicles, vehicle components, etc., can solve the problem of lack of wheel drive anti-skid control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
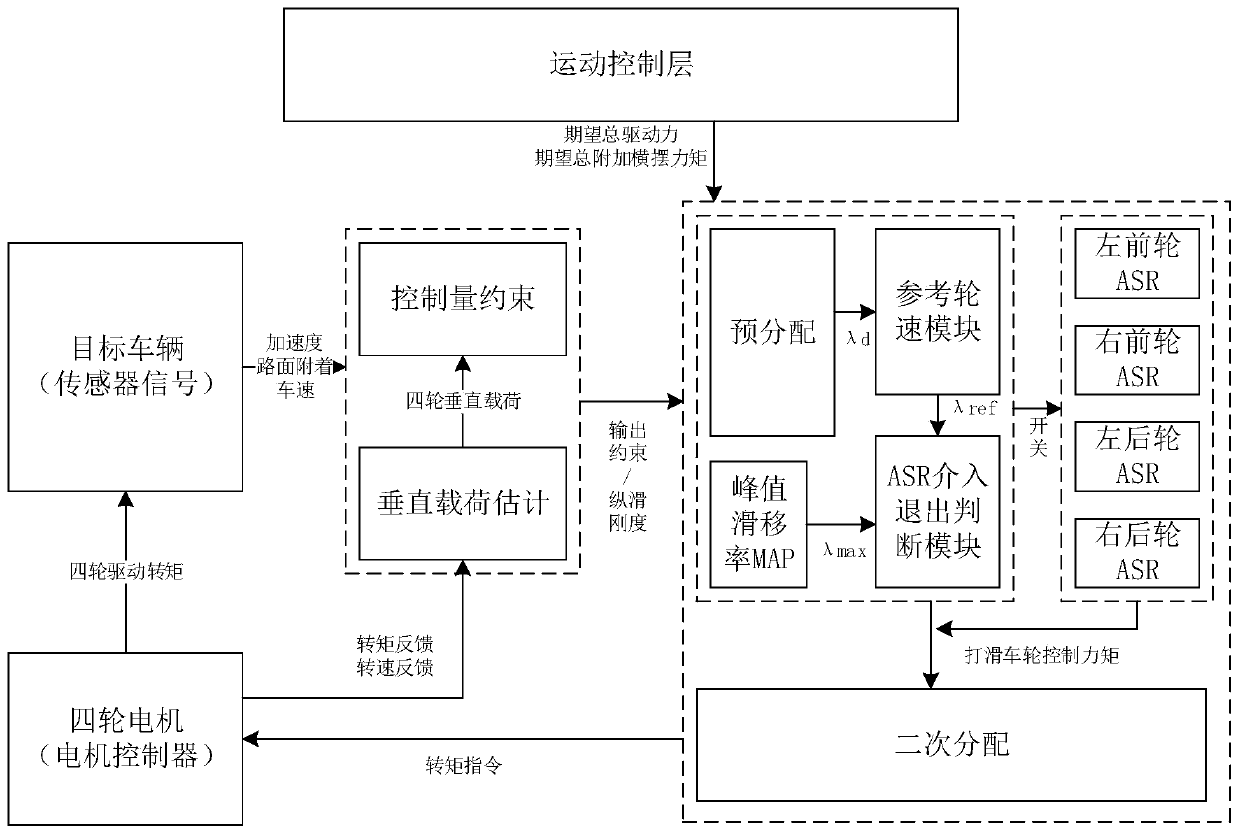
[0076] Such as figure 1 As shown, the present invention provides a four-wheel torque distribution control system for distributed drive electric vehicles. The system includes a motor controller and a motor torque distributor. The motor controller is provided with 4 drive motors respectively connected to the corresponding 4 wheels. The system also includes a vehicle state measurement unit, a control output constraint calculation unit, a torque control mode unit, a drive anti-slip control unit and a four-wheel torque distribution unit.
[0077] The four-wheel torque distribution control system calculates the control output constraints based on the obtained vehicle state information, and then judges the working mode according to the degree of wheel slippage. The torque distribution unit converts the expected total driving force and additional yaw torque required by the upper motion control layer into torque commands for the four drive motors, and the motor controller controls the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More