

Indoor positioning method based on LSTM and multi-sensor fusion
A multi-sensor fusion, indoor positioning technology, applied in instruments, measuring devices, mapping and navigation, etc., can solve the problem of high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0131] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
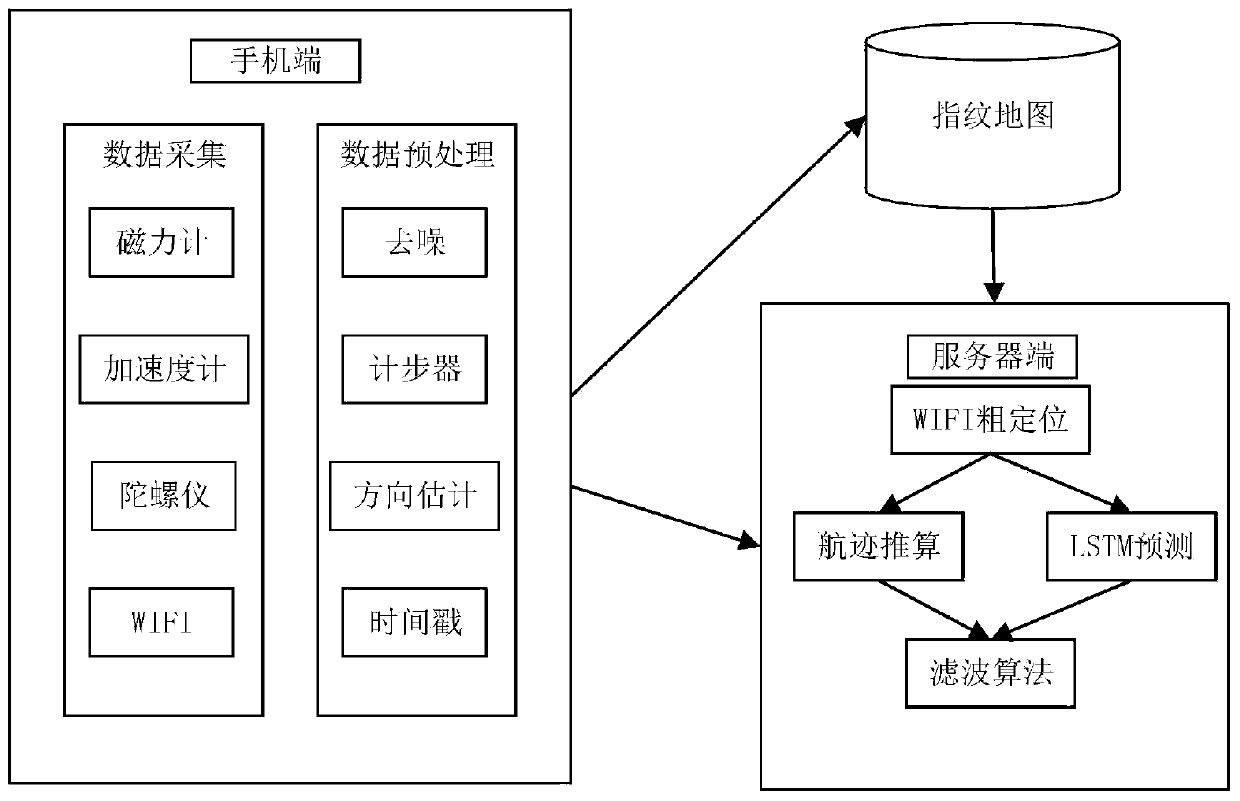
[0132] Such as figure 1 As shown, it is a flow chart of the indoor positioning method based on LSTM and multi-sensor fusion of the present invention. The indoor positioning method based on LSTM and multi-sensor fusion of the present invention is characterized in that it comprises the following steps:
[0133] Step 1: Make the pedestrians to be located equipped with mobile phones, and collect the three-axis acceleration A of the pedestrians at the t moment with the sampling frequency F through the accelerometer, geomagnetic sensor, and gyroscope of the mobile phone t =[a xt ,a yt ,a zt ] T , three-axis magnetic value M t =[m xt ,m yt ,m zt ] T , three-axis angular velocity Ω t =[w xt ,w yt ,w zt ] T , collect the position coordinates of pedestrians at the tth moment (pos xt ,pos yt ), form a data set, and transmit the data set t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More