

A Ground Experiment Verification System for Space Robots
A verification system and ground experiment technology, applied in the field of compliant control method of space robot and ground experiment verification system, can solve the problems of lack of reliable ground experiment verification system, lack of space machine heat, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0059] In the process of the end-of-arm tool of a space robot capturing a non-cooperative target, the contact force between the end-of-arm tool and the non-cooperative target is often the force generated by the collision, so the compliant control of the end-of-arm tool needs to have a high response speed, and It is also required that the end-of-arm tooling can operate smoothly according to the magnitude and direction of the collision force.
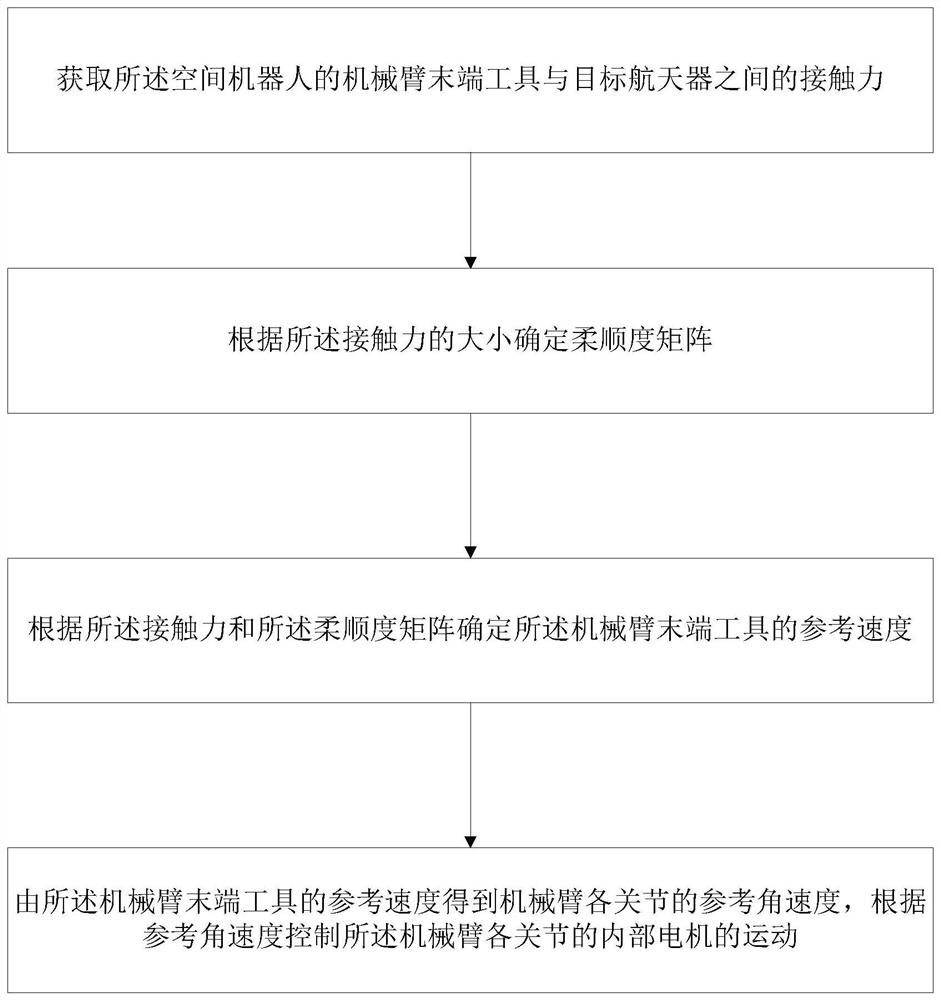
[0060] Such as figure 1 As shown, the present invention provides a compliant control method for a space robot, comprising the following steps:
[0061] S1: Obtain the contact force between the end-of-arm tool of the space robot and the target spacecraft;
[0062] S2:: determine the compliance matrix according to the size of the contact force;
[0063] S3: Determine the reference speed of the end-of-arm tool according to the contact force and the compliance matrix;
[0064] S4: Obtain the reference angular velocity of each joint of the ...
Embodiment 2
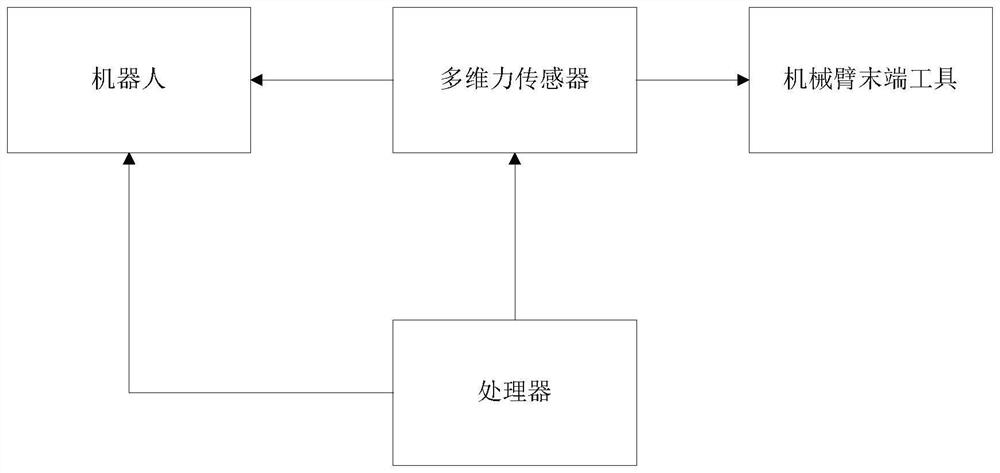
[0074] Such as image 3 As shown, a ground experiment verification system includes: robot, end-of-arm tool, multi-dimensional force sensor and processor;
[0075] The multi-dimensional force sensor is connected to the robot and the end-of-manipulator tool respectively, and collects the contact force between the end-of-manipulator tool and the environment in the X-axis, Y-axis, Z-axis and The values on the components around the X axis, around the Y axis, and around the Z axis;
[0076] a processor, connected in communication with the robot and the multi-dimensional force sensor, for receiving real-time information of the robot and the multi-dimensional force sensor and sending motion control instructions to the robot and the multi-dimensional force sensor in real time; performing sliding mean filtering on the contact force collected by the multi-dimensional force sensor and compensating the zero point drift of the multi-dimensional force sensor; and compensating the gravity ...
Embodiment 3
[0137] If the ground experiment verification system is implemented in the form of a software function unit and sold or used as an independent product, it can be stored in a computer-readable storage medium. Based on this understanding, the present invention realizes all or part of the processes in the methods of the above embodiments, and can also be completed by instructing related hardware through computer programs. The computer program can be stored in a computer-readable storage medium, and the computer When the program is executed by the processor, the steps in the above-mentioned various method embodiments can be realized. Wherein, the computer program includes computer program code, and the computer program code may be in the form of source code, object code, executable file or some intermediate form. The computer-readable medium may include: any entity or device capable of carrying the computer program code, a recording medium, a U disk, a removable hard disk, a magnet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More