

Unmanned aerial vehicle path planning method based on potential function reward DQN under environmental information unknown continuous state
A technology of continuous state and environmental information, applied in vehicle position/route/altitude control, non-electric variable control, instruments, etc., can solve problems such as limited state and slow network convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The technical solution of the present invention is described in detail in combination with the accompanying drawings.
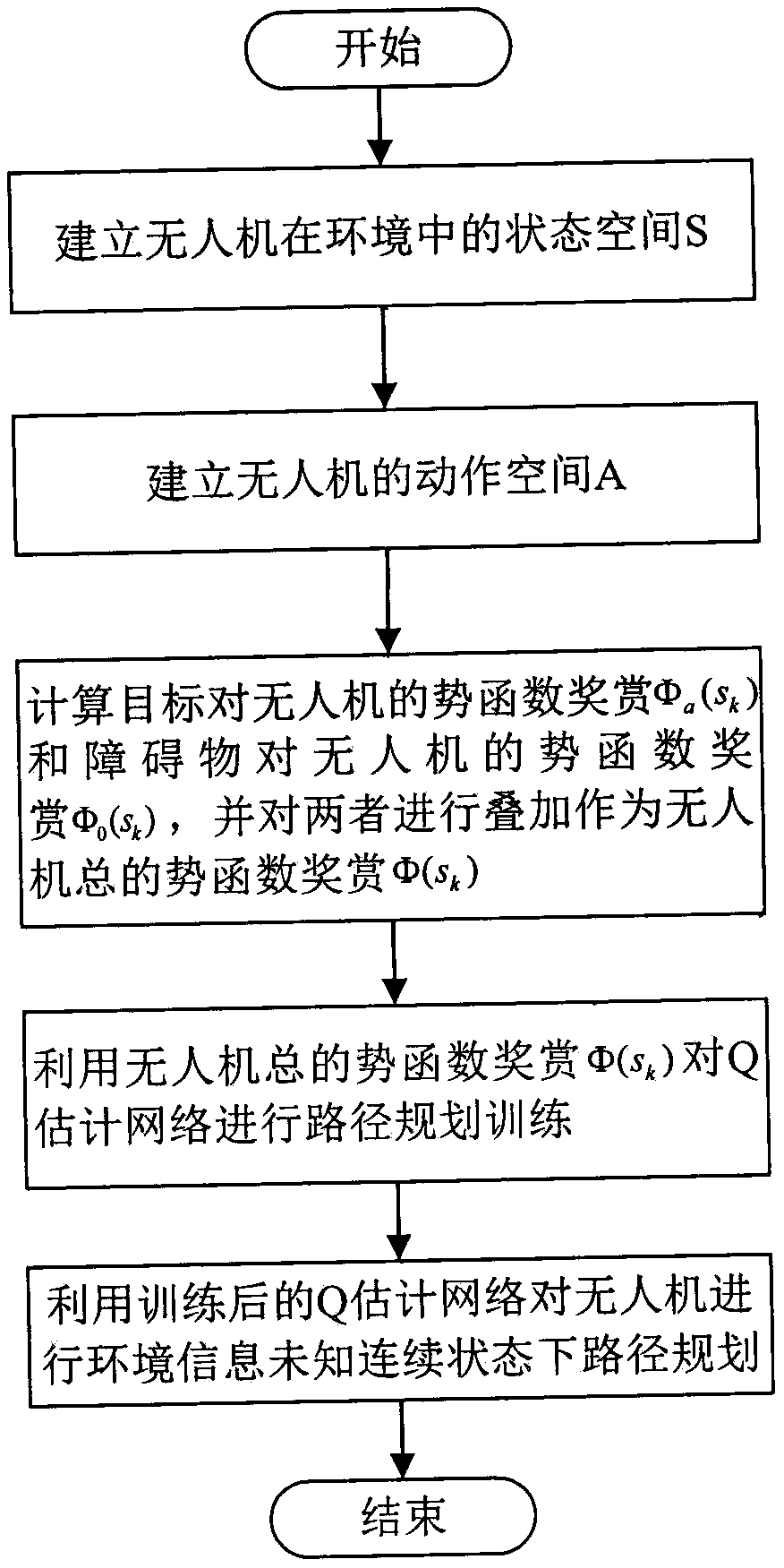
[0056] like figure 1 As shown, a UAV path planning method based on potential function reward DQN under a continuous state of unknown environmental information of the present invention, specifically includes the following steps:
[0057] Step 1 establishes the state space S of the UAV in the environment, the specific process is:
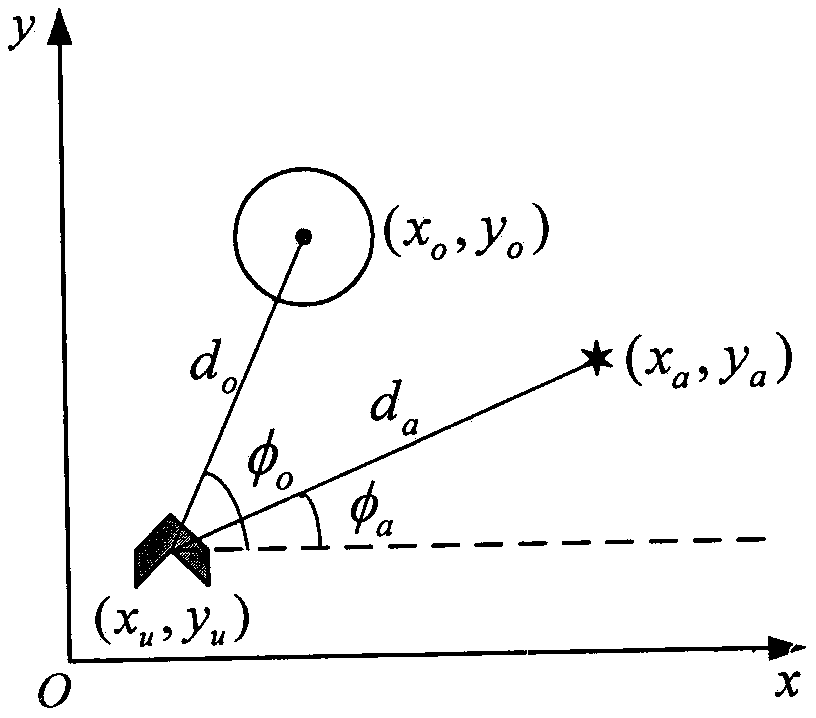
[0058] Establish a Cartesian coordinate system for the environment where the UAV is located, and set the position of the UAV in the environment as (x u ,y u ), the position of the target is (x a ,y a ), the position of the obstacle closest to the UAV is (x o ,y o ),like figure 2 shown. The distance d from the drone to the target can be easily calculated from the figure a , the distance from the UAV to the nearest obstacle d o , The angle φ between the connection line from the UAV to the target and the positive semi-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More