Registration method, device, equipment and medium of laser point cloud and 2D image
A laser point cloud and image technology, applied in the field of intelligent transportation, can solve problems such as the inability to find points with the same name, the lack of significant improvement in the registration accuracy of laser point clouds and high-precision images, and matching errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
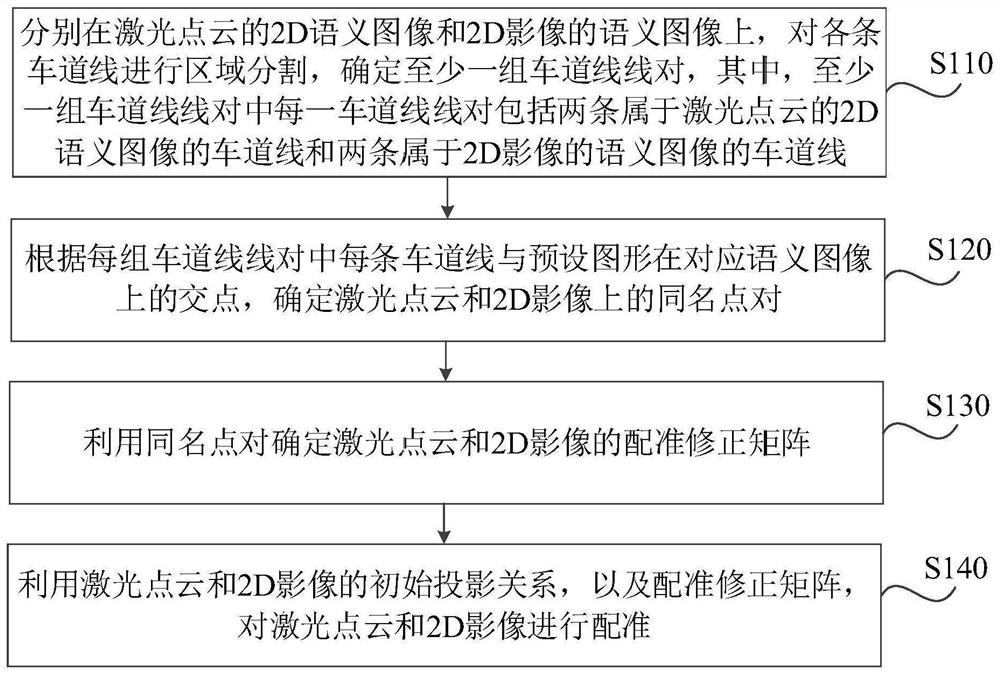
[0035] figure 1 It is a flow chart of the registration method of laser point cloud and 2D image provided by the first embodiment of the present invention. In the case of 2D image registration, the method can be implemented by a device for registering laser point clouds and 2D images, which can be implemented in software and / or hardware, and can be integrated in any computing device, including but not Limited to servers, on-board computing devices, etc.
[0036] During the registration process of laser point cloud and 2D image, the laser point cloud data and 2D image can be continuously received in the form of data stream or image stream. Taking the laser point cloud data and 2D image obtained through data collection as an example, the registration process of the laser point cloud and 2D image will be described in detail. Each semantic image mentioned in the embodiment refers to the semantic image of the laser point cloud and the semantic image of the 2D image that participat...
Embodiment 2
[0053] image 3 It is a flow chart of the registration method of laser point cloud and 2D image provided by Embodiment 2 of the present invention. This embodiment further optimizes and expands on the basis of the above embodiment. Such as image 3 As shown, the method may include:
[0054] S210, for the 2D semantic image of the laser point cloud and the semantic image of the 2D image, respectively determine the target area including the lane line on each semantic image, and determine the disappearance on each semantic image according to the direction of the lane line in the target area point.
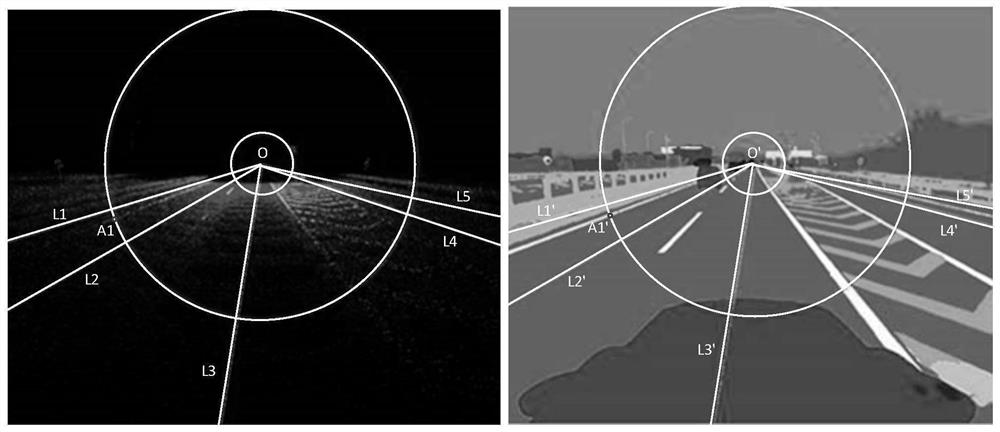
[0055] In this embodiment, the vanishing point refers to a virtual intersection point of multiple fitted straight lines after the near and far straight lines are respectively fitted to the multiple lane lines on the semantic image. The size of the target area can be flexibly set under the condition that the overall extension trend of each lane line from near to far on each semantic i...
Embodiment 3
[0077] Figure 4 It is a flow chart of the registration method of laser point cloud and 2D image provided by Embodiment 3 of the present invention. This embodiment is further optimized and expanded on the basis of the above embodiments. Such as Figure 4 As shown, the method may include:
[0078] S310. Perform pixel classification on the laser point cloud image in 3D space to obtain a 3D semantic image of the laser point cloud, and use the initial projection relationship between the laser point cloud and the 2D image to perform projection transformation on the 3D semantic image to obtain the 2D semantic image of the laser point cloud. image.
[0079] Among them, the laser point cloud data includes the 3D spatial information of each object point in the driving environment. After pixel classification based on the intensity information of the laser point cloud in the 3D space, the 3D semantic image of the laser point cloud can be obtained, and then projected to 2D Space, get t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More