

ROS platform online mechanical arm demonstration system based on human body posture recognition
A technology of human body posture and robotic arm, applied in the field of ROS platform online robotic arm teaching system, can solve the problem of low control accuracy, achieve high precision, reduce technical level requirements and system cost, and improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
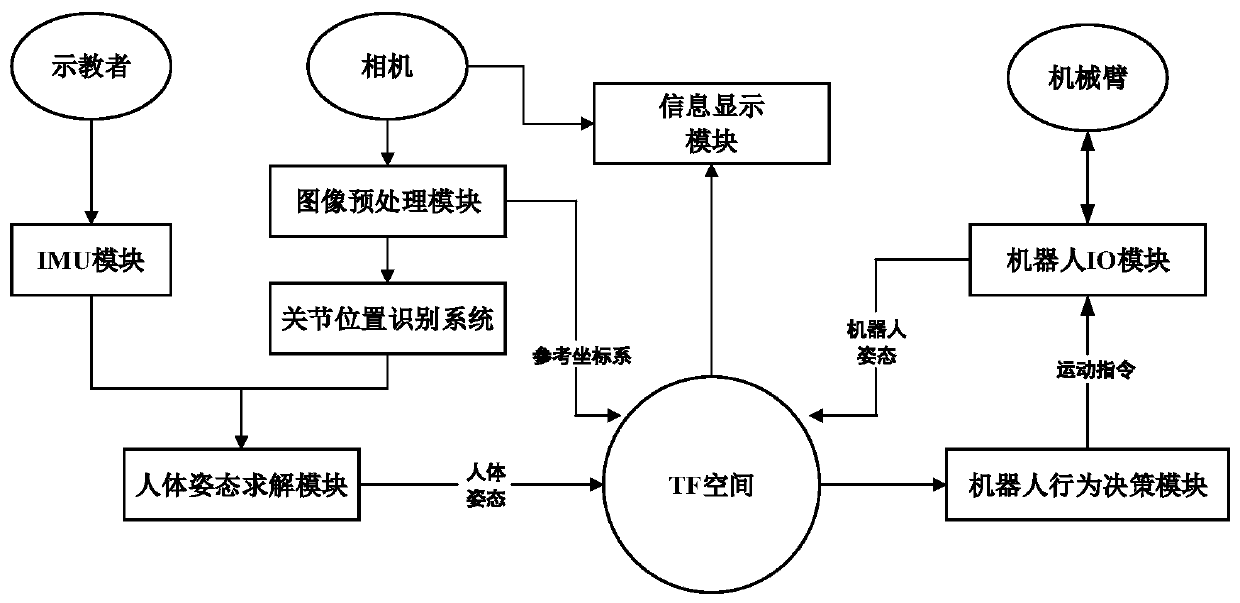
[0025] An online manipulator teaching system on the ROS platform based on human body posture recognition, such as figure 1 As shown, it includes two color cameras Microsoft KinectV2, five IMUs based on JY901 and Bluetooth modules, one computer with Ubuntu system installed, and one UR5 robotic arm produced by Universal Robots. The camera and the computer transmit data through a USB connection, the IMU and the computer transmit data through Bluetooth, and the robotic arm is connected to the computer through a local area network. The CPU of the computer in this system uses Intel Core i7-7800K 3.50Ghz, and the GPU uses Nvidia TITAN Xp.
[0026] combine figure 1 , the principle and application process of the patent of the present invention are as follows:
[0027] The image preprocessing module first takes the AR logo ArUco Marker#0 recognized by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More