

Self-adaptive three-step method-based truck formation driving following vehicle control method
A control method, a three-step technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, control/regulation system, etc., to achieve the effect of improving fuel economy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings:
[0017] An adaptive three-step method-based truck platooning following car control method includes the following steps:
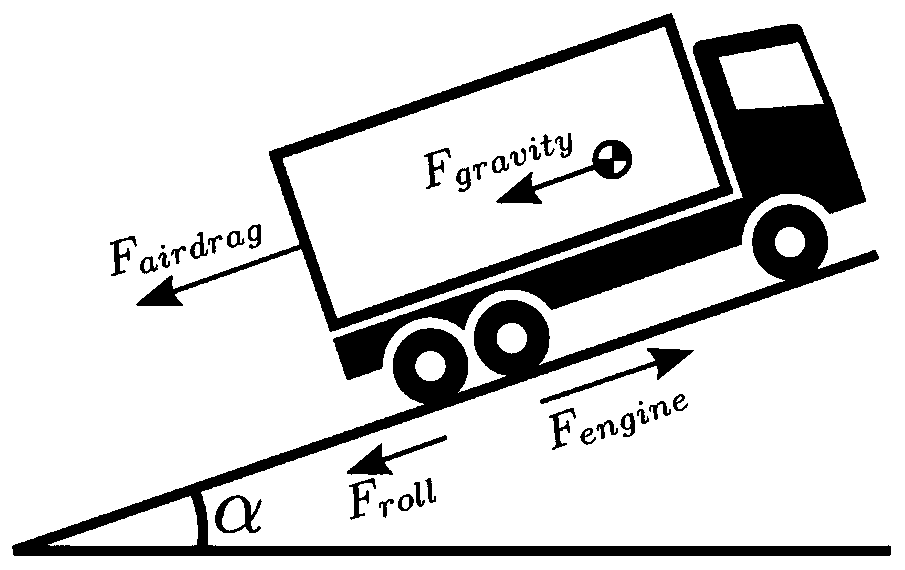
[0018] Step 1: Establish the longitudinal dynamics equation of the vehicle according to the force on the vehicle during driving.
[0019] The kinematics of the truck is very complicated during driving. Many studies are based on high-precision vehicle dynamics models, but in fact, complex vehicle dynamics models are not easy to establish, and it is also not conducive to the design of the controller. The invention simplifies the truck kinematics model to a single-degree-of-freedom vehicle model on the basis of Newton’s second law. The driving torque generated by the truck engine acts on the wheels via the drive train, and overcomes all the driving resistance to push the truck forward. . The schematic diagram of the longitudinal f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More