

Multi-binocular camera motion calibration method based on non-common-view area
A binocular camera and calibration method technology, which is applied in image data processing, instruments, calculations, etc., can solve the problems of inaccurate binocular camera calibration results, complicated operation, and inconvenience, and achieve high accuracy, accurate detection results, The effect of simple installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
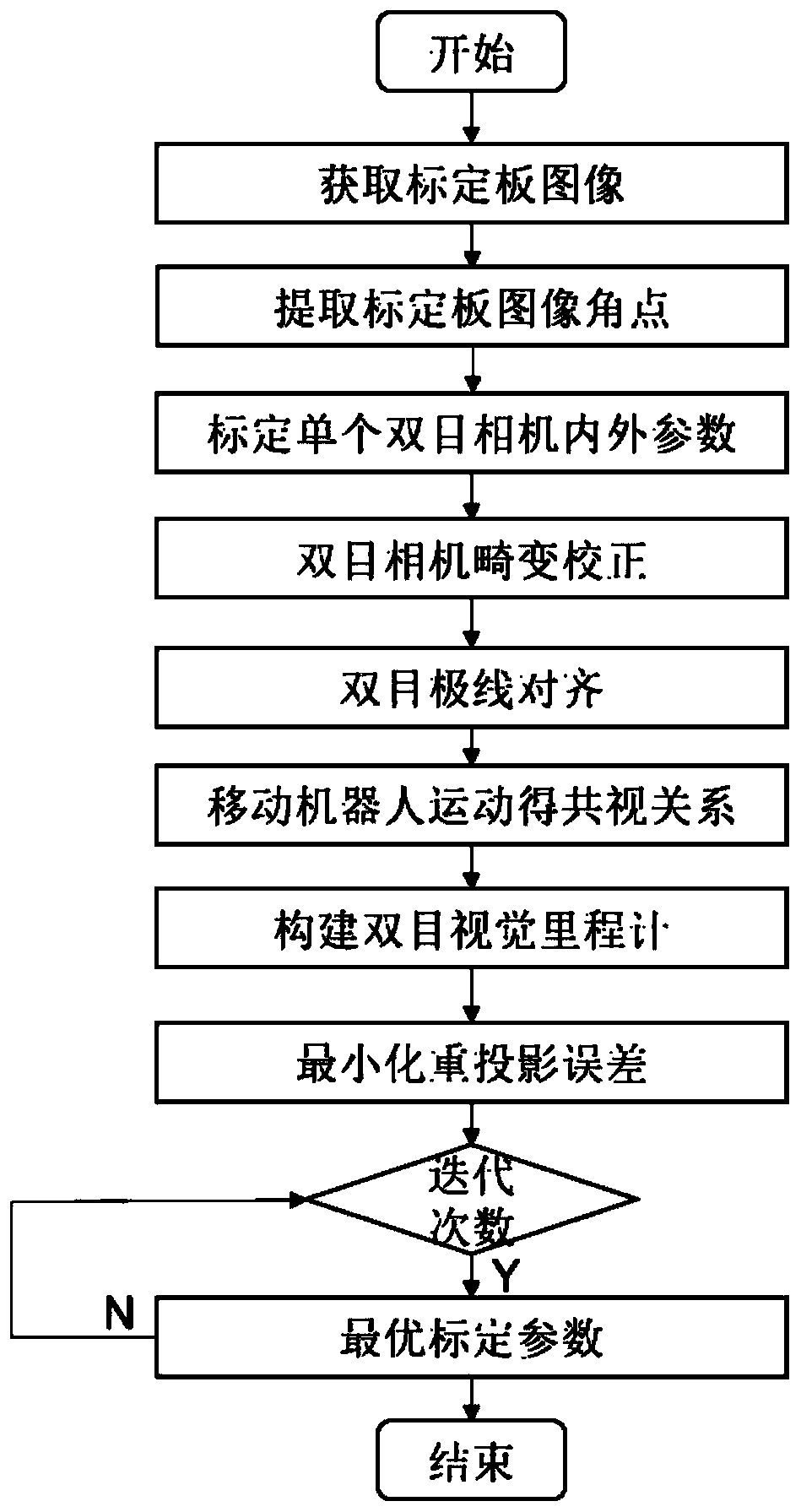
[0045] A motion calibration method for multiple binocular cameras based on no-common-view regions, figure 1 It is a specific flow chart of the present invention. The device used in the method for calibrating multi-binocular camera sensor parameters without a common view area includes a binocular camera I and a binocular camera II, a camera plane calibration board, and an algorithm execution mechanism (control computer) and two mobile robots. The two cameras to be tested are respectively installed on the mobile robot, and the control computer is installed inside the mobile robot, which is used to collect and record the data output by the above equipment in real time and perform calculation an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More