

A pressure adsorption type pole climbing robot
An adsorption, robot technology, applied in the direction of motor vehicles, transportation and packaging, can solve the problems of high failure rate, complex structure, difficult to control and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
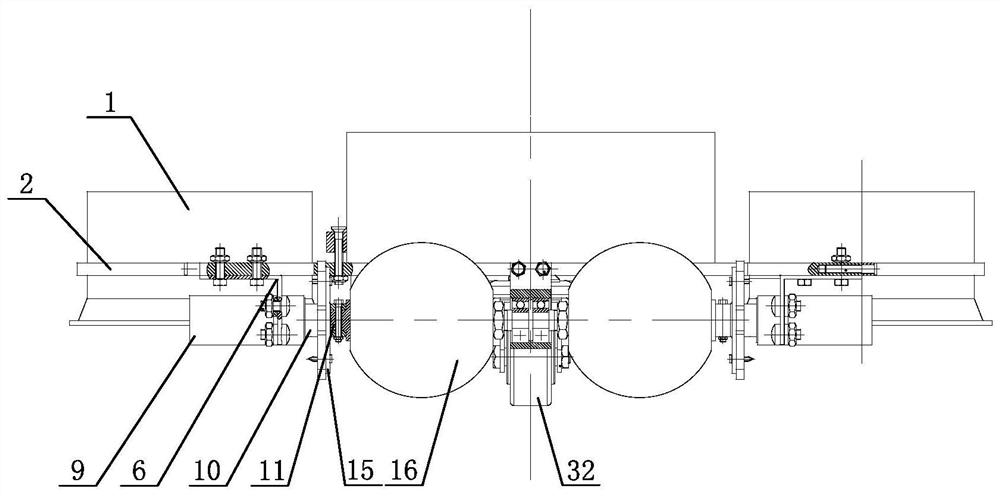
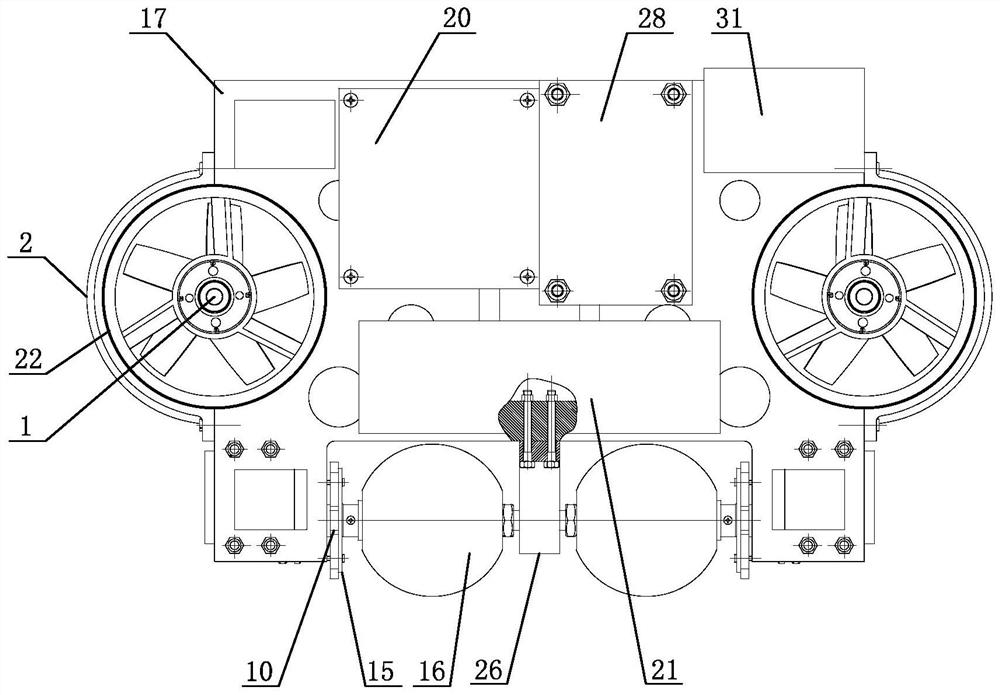
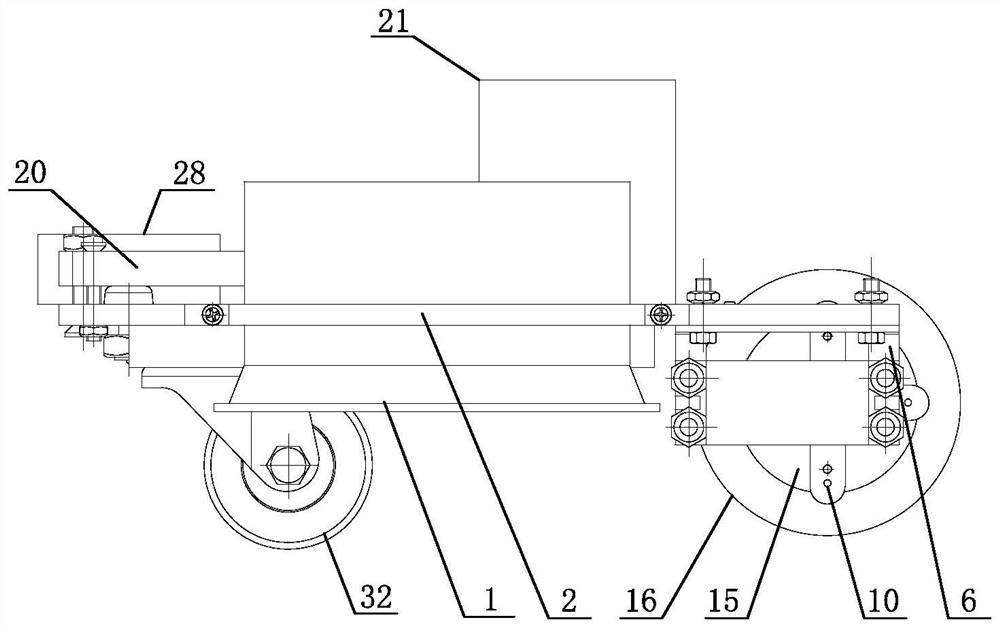
[0029] Specific implementation mode one: combine Figure 1 to Figure 5 Describe this embodiment. In this embodiment, the pressure adsorption type pole climbing robot includes a fuselage 17, an electric control system, two drive mechanisms and two adsorption mechanisms. At the front end of the body 17, the pole-climbing robot realizes forward, backward and turning through two driving mechanisms. An adsorption mechanism is respectively arranged in the grooves on both sides of the fuselage 17, and the pole-climbing robot is adsorbed on the pole or vertical surface by two adsorption mechanisms. Above, the electronic control system is arranged on the fuselage 17 to control the two driving mechanisms and the two adsorption mechanisms.
[0030] The present invention realizes the pole climbing function by absorbing the thrust generated by the ducted fan and controlling the movement of the driving mechanism, the electric control system is greatly simplified, the structure is relatively...
specific Embodiment approach 2
[0031] Specific implementation mode two: combination Figure 1 to Figure 5 Describe this embodiment, in this embodiment, each driving mechanism comprises steering gear 9, steering gear arm 10, flange plate 15, drive shaft 11, driving wheel 16 and steering gear bracket 6, and the front end middle position of fuselage 17 is set There are bearing blocks 26, two deep groove ball bearings are arranged side by side in the bearing blocks 26, the steering gear 9 is installed on the lower end surface of the fuselage 17 through the steering gear bracket 6, the steering gear arm 10 is mounted on the steering gear 9, the steering gear arm 10 and the flange 15 are fixedly connected by self-tapping screws, the drive wheel 16 is set on the drive shaft 11 and locked with a thin nut, and the flange 15 is fixedly connected with one end of the drive shaft 11 by a M1.4 screw. The other end of the drive shaft 11 is inserted in the deep groove ball bearing.
[0032] Among them, the steering gear i...
specific Embodiment approach 3
[0034] Embodiment 3: In this embodiment, the driving wheel 16 is a spherical wheel.
[0035] The wheel adopts a spherical shape, which can adapt to the arc of the rod, and also has certain adaptability to the diameter of the rod.
[0036] Other compositions and connection methods are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More