

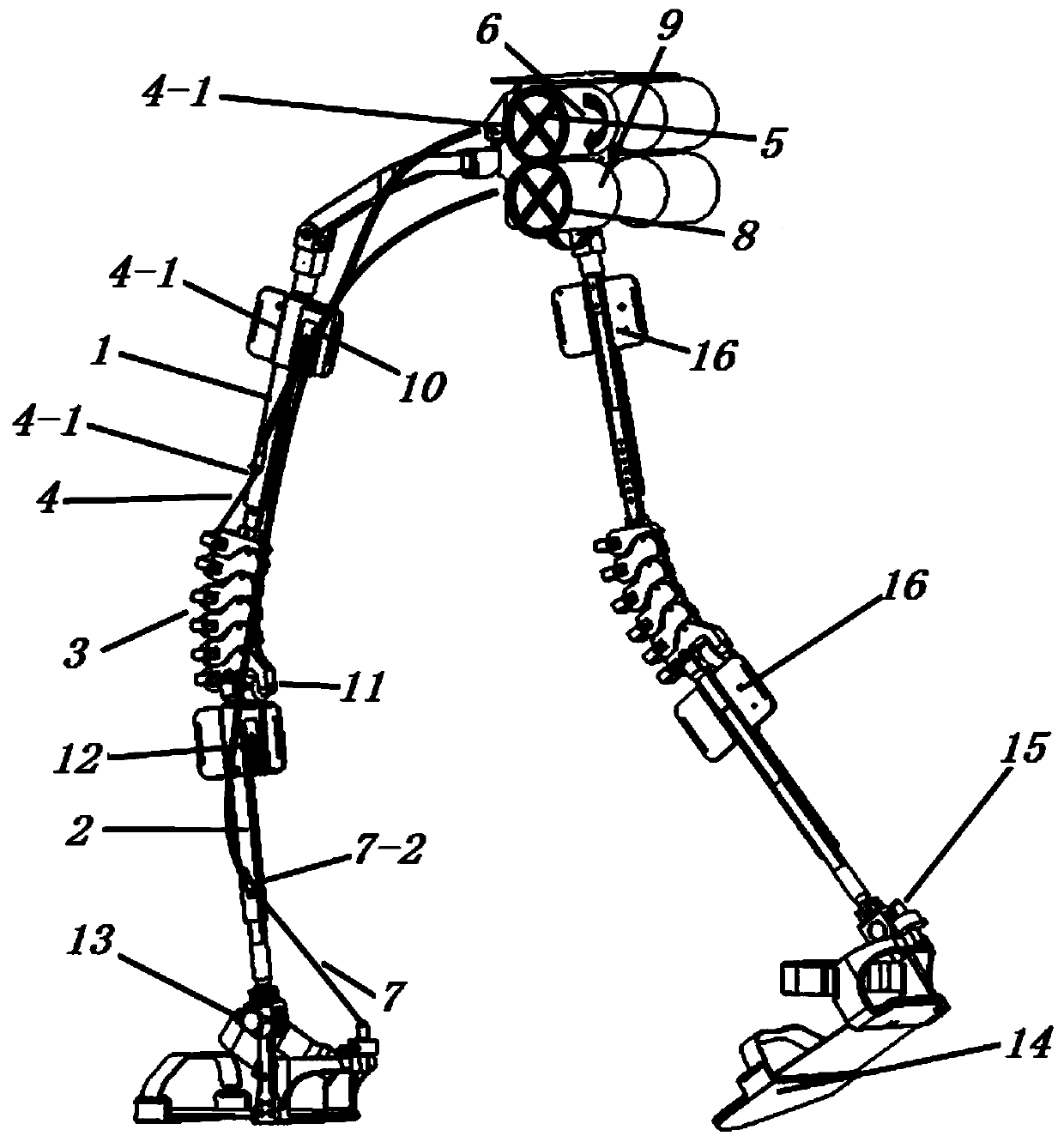
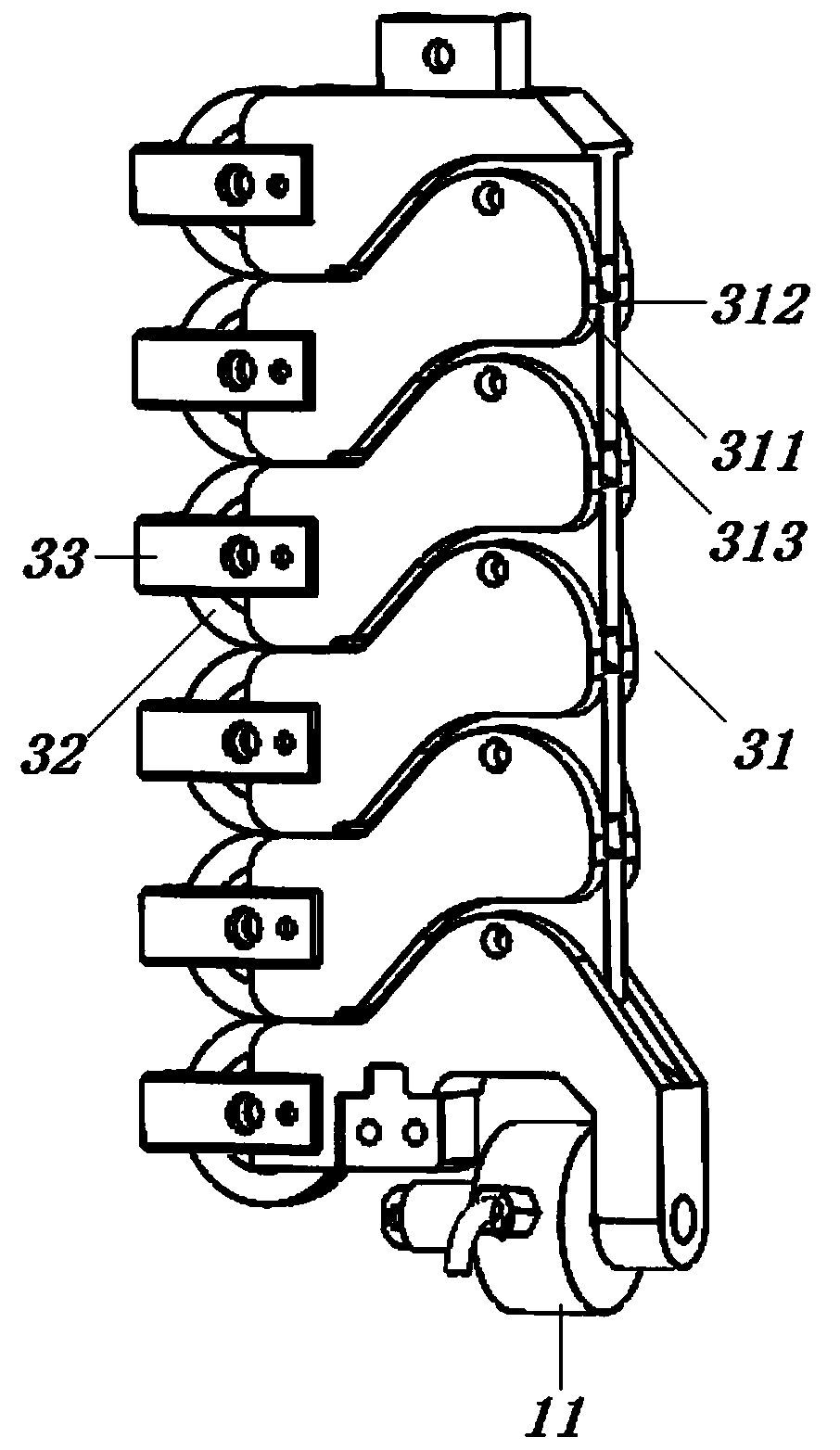
Rigid-flexible hybrid driven wearable power-assisted exoskeleton
A hybrid drive and exoskeleton technology, applied in the direction of manipulators, joints, program control manipulators, etc., can solve the problem of low output power and achieve the effect of reducing the inertia of the mechanism and reducing the volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The present invention will be described in detail below in conjunction with the implementations shown in the drawings, but it should be noted that these implementations are not limitations of the present invention, and those of ordinary skill in the art based on the functions, methods, or structural changes made by these implementations Equivalent transformations or substitutions all fall within the protection scope of the present invention.
[0024] The technical idea of the present invention is: the existing wearable exoskeletons are roughly divided into rigid exoskeletons and flexible exoskeletons, but each has its own disadvantages, such as poor wearing comfort and poor response speed of the whole machine caused by rigid exoskeletons. And disadvantages such as poor maneuverability, excessive weight of the whole machine, and mostly single-axis knee joints that do not conform to the movement form of human knee joints; flexible exoskeletons have disadvantages such as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More