

Measurement error compensation method for vehicle-mounted INS/OD integrated navigation system
An integrated navigation system, error compensation technology, applied in the direction of navigation, navigation, mapping and navigation through speed/acceleration measurement, can solve the problem of insufficient consideration of dynamic changes of lever arm, lack of inertial navigation system and odometer measurement Problems such as calibration and estimation of sexual parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
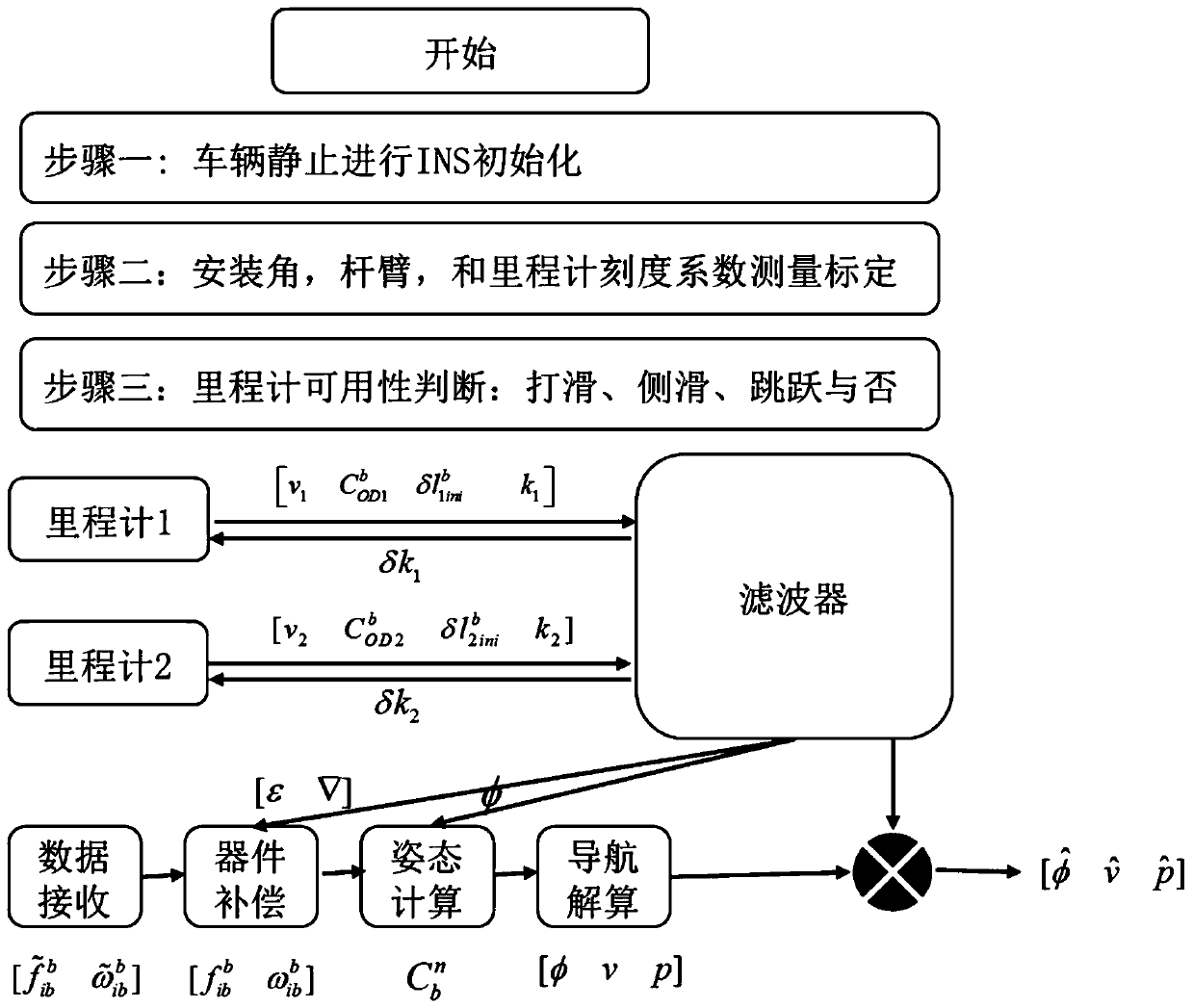
[0065] The present invention is divided into four stages, the first stage is the INS initialization stage, the second stage calibrates the initial value of the installation angle error, the lever arm, and the odometer scale coefficient; the third stage is the data acquisition and processing stage, the odometer availability judgment and the INS device error compensation, attitude calculation and navigation calculation. The fourth stage is combined filtering and feedback correction stage.
[0066] Concrete implementation steps of the present invention are as figure 2 Shown:
[0067] (1) The vehicle is stationary for INS initialization;
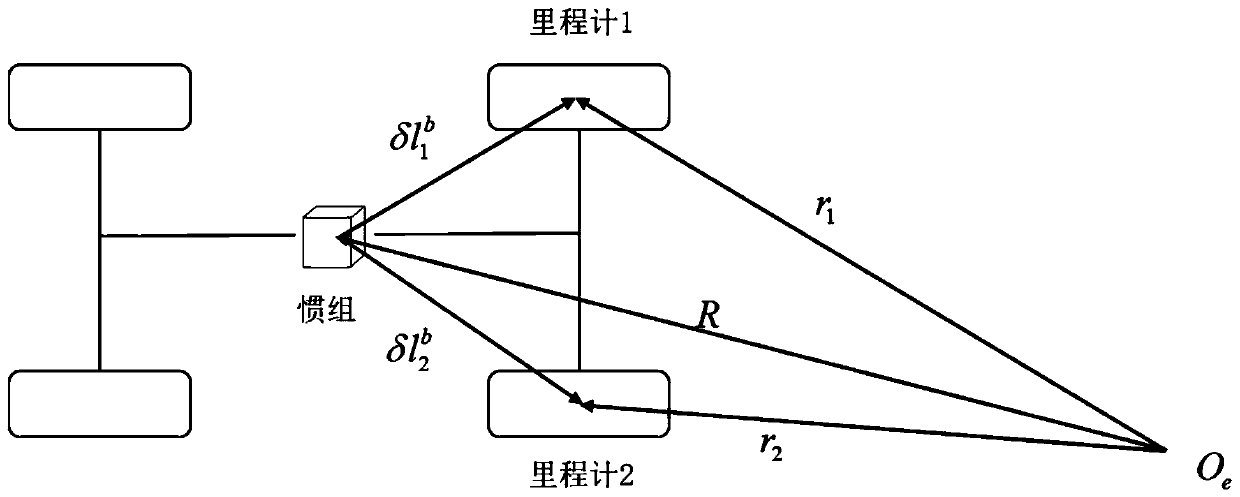
[0068] (2) Use measuring instruments and vehicle structure to measure and calibrate the installation angle error and lever arm error, such as figure 1 As shown, the scale coefficient of the odometer is also calibrated to obtain the coordinate transformation matrix of odometer 1 and odometer 2 relative to the carrier system, the error of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More