

Stereoscopic vision navigation method based on green crop feature extraction invariance
A technology of stereo vision and feature extraction, applied in the field of visual navigation, can solve the problems of affecting the acquisition of image information, mixing of multiple factors, and low accuracy of farmland robot navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0185] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
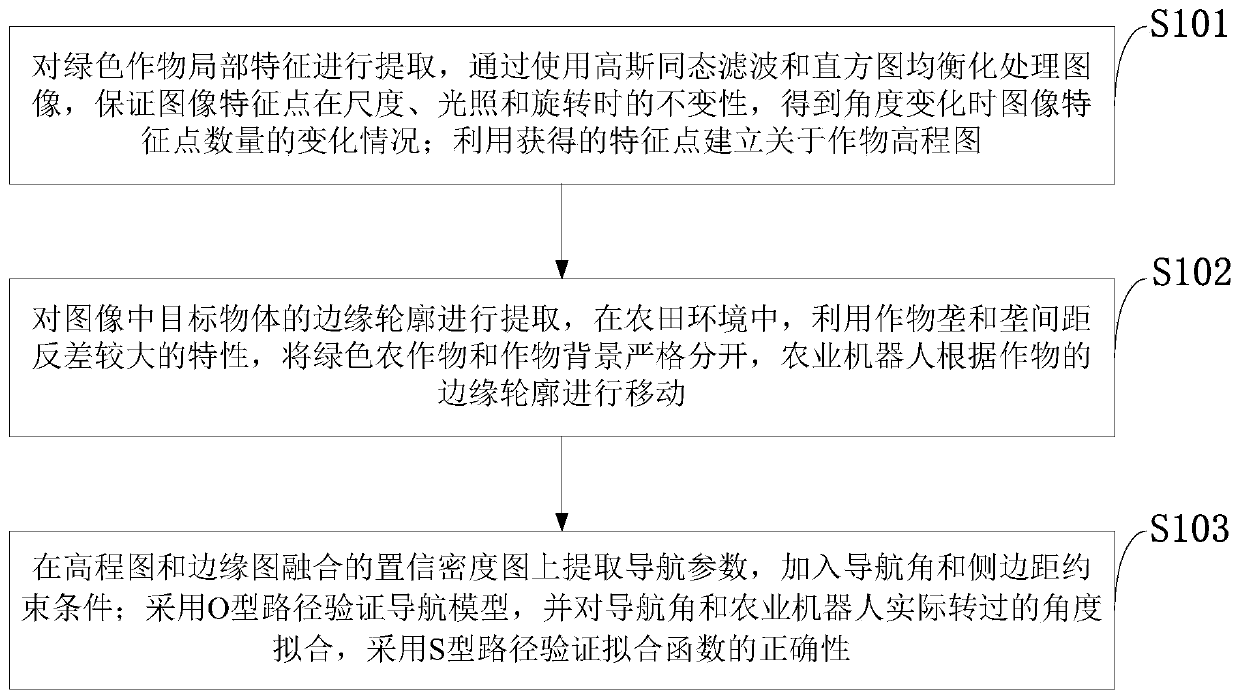
[0186] Under natural conditions, the farmland environment is complex and changeable, and the adaptability of the control algorithm of the agricultural robot is very high; when the natural illumination, the angle of view of the image, etc. change, the acquisition of image information will be affected, resulting in the navigation accuracy of the farm robot. low problem. The invention realizes the automatic navigation control of the agricultural robot by constructing the agricultural robot platform, processing the agricultural crop image information collected by the binocular camera, and extracting the parameters of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More