

A Multi-UAV Area Coverage Deployment Method Based on Particle Swarm Genetic Algorithm
A genetic algorithm and multi-UAV technology, which is applied in the field of multi-UAV area coverage deployment based on particle swarm genetic algorithm, can solve the problem of uneven deployment of UAVs, and it is difficult to ensure UAV network connectivity and area coverage. It is difficult to guarantee the rate, so as to avoid falling into local extremum, improve regional coverage, and ensure the effect of connectivity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
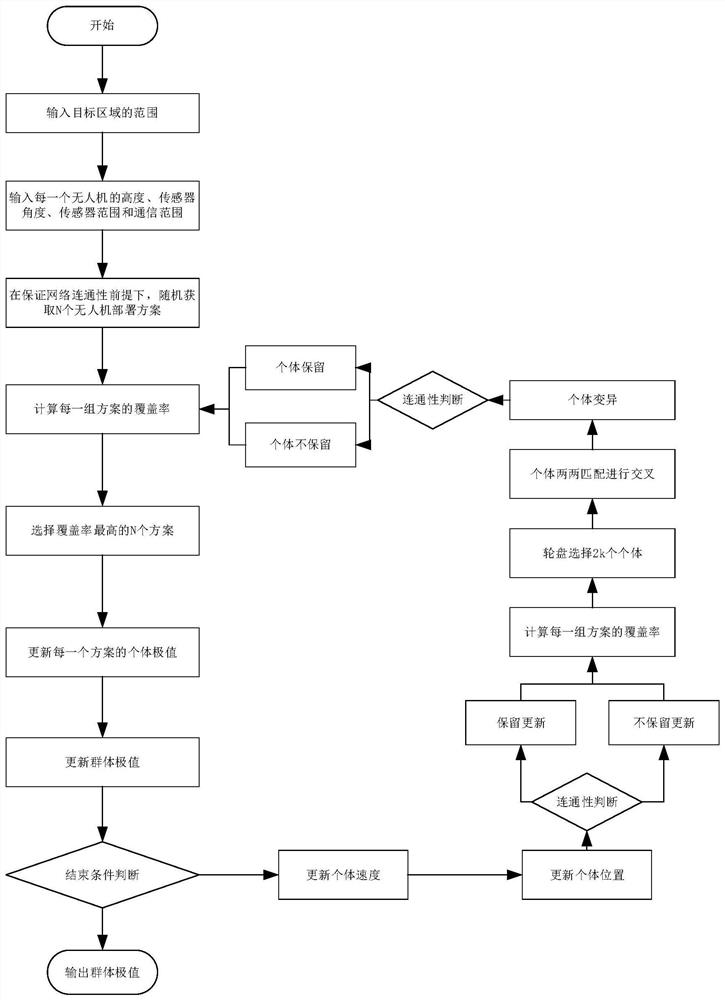
[0053] A method for deploying multi-UAV area coverage based on particle swarm genetic algorithm, comprising the following steps:
[0054] Step 1) Input the length L and width W of the target area;
[0055] Step 2) Input the number of UAVs Total, sensor deployment angle θ, sensor coverage radius Rs and maximum communication radius Rt, traverse each UAV U ξ , enter UAV U ξ the height H ξ ;
[0056] Step 3) Initialize the empty deployment plan set PList, randomly deploy UAVs within the range of length L and width W, and determine whether the UAV cluster is connected. When the UAV cluster is connected, the current UAV Deployment scheme P i Save in the middle of the deployment scheme collection PList, repeat this step until the number of collections in the deployment scheme collection PList is equal to N, and the N represents the number of individuals in the initial population;
[0057] Step 4) calculate the area coverage of each scheme in the collection PList, the coverage re...
Embodiment 2
[0093] A method for deploying multi-UAV area coverage based on particle swarm genetic algorithm, comprising the following steps:
[0094] Step 1) Input the range of the target area 100m×100m, such as figure 2 shown.
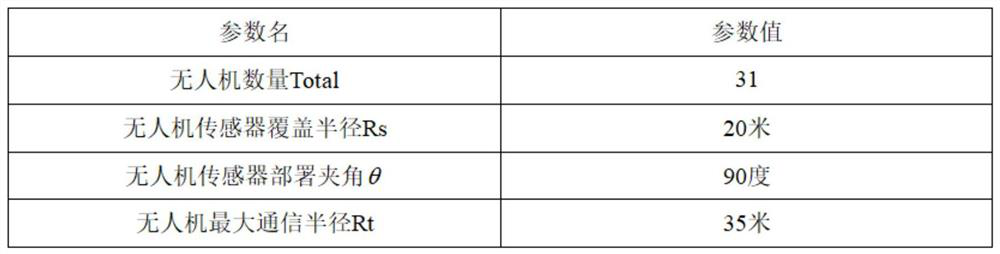
[0095] Step 2) Input the number of UAVs Total31, UAV sensor coverage radius Rs20 meters, UAV sensor deployment angle θ90 degrees, UAV maximum communication radius Rt 35 meters, such as image 3 As shown, in order to facilitate the description of the coverage problem, it is set that the flying height of all UAVs is 16 meters when performing tasks, and the coverage radius of all UAVs on the ground is 12 meters.
[0096] Step 3) Randomly deploy UAVs under the premise of ensuring network connectivity, and obtain a set of 40 schemes. Set deployment plan is a random scheme that satisfies the connectivity of the network.
[0097] Step 4) Calculate the area coverage of the deployment scheme, and divide the target area into 10,000 1×1 small square grids. It can be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More