

Flexible magnetic net type mechanical grabbing device
A technology of mechanical grasping and flexible net, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as difficulty in adapting to objects of different shapes, damage to grasped objects and their surfaces, small load bearing capacity, etc., to achieve uniform force application , Good fit, stable center of gravity of the device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with specific embodiments.
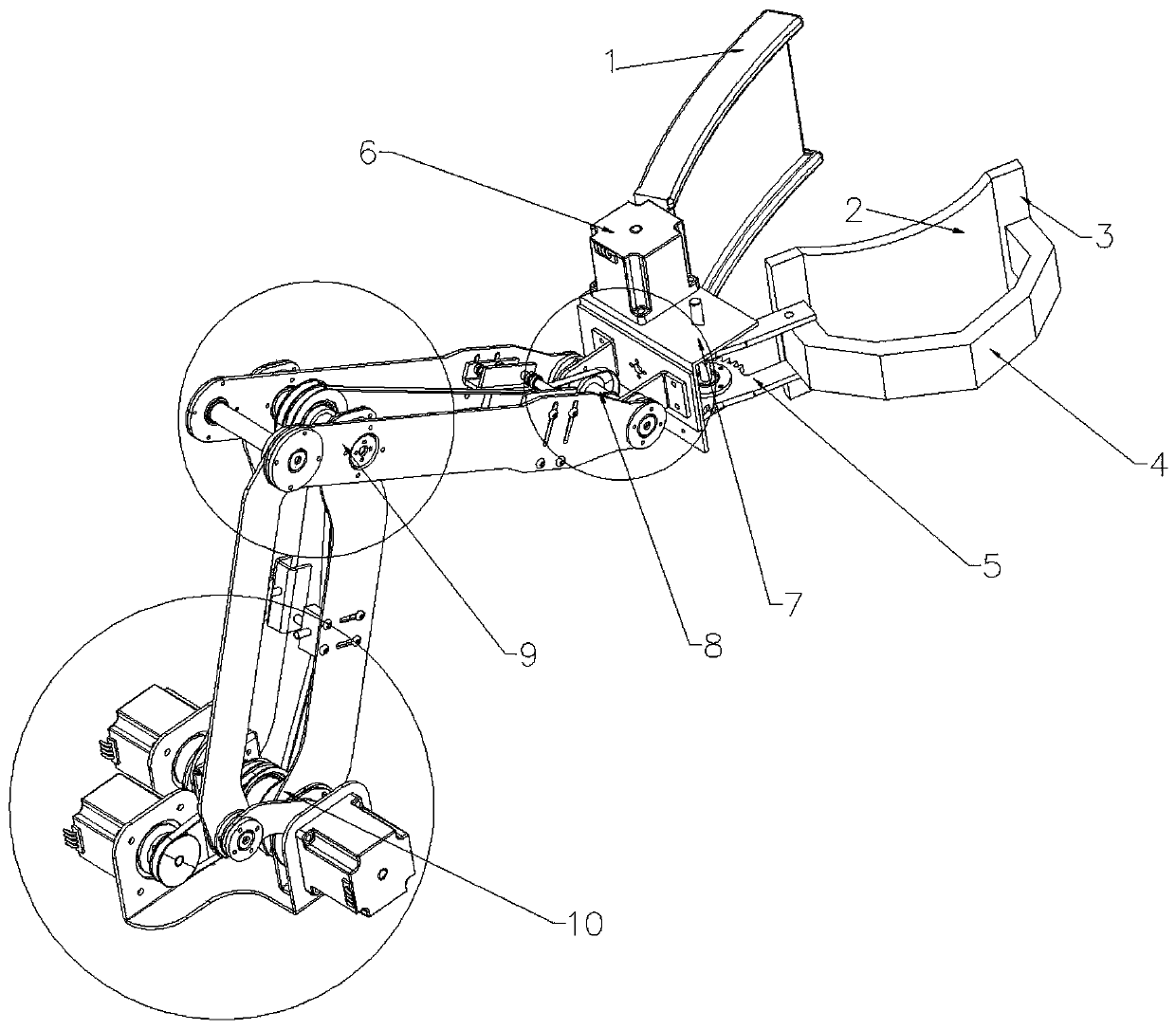
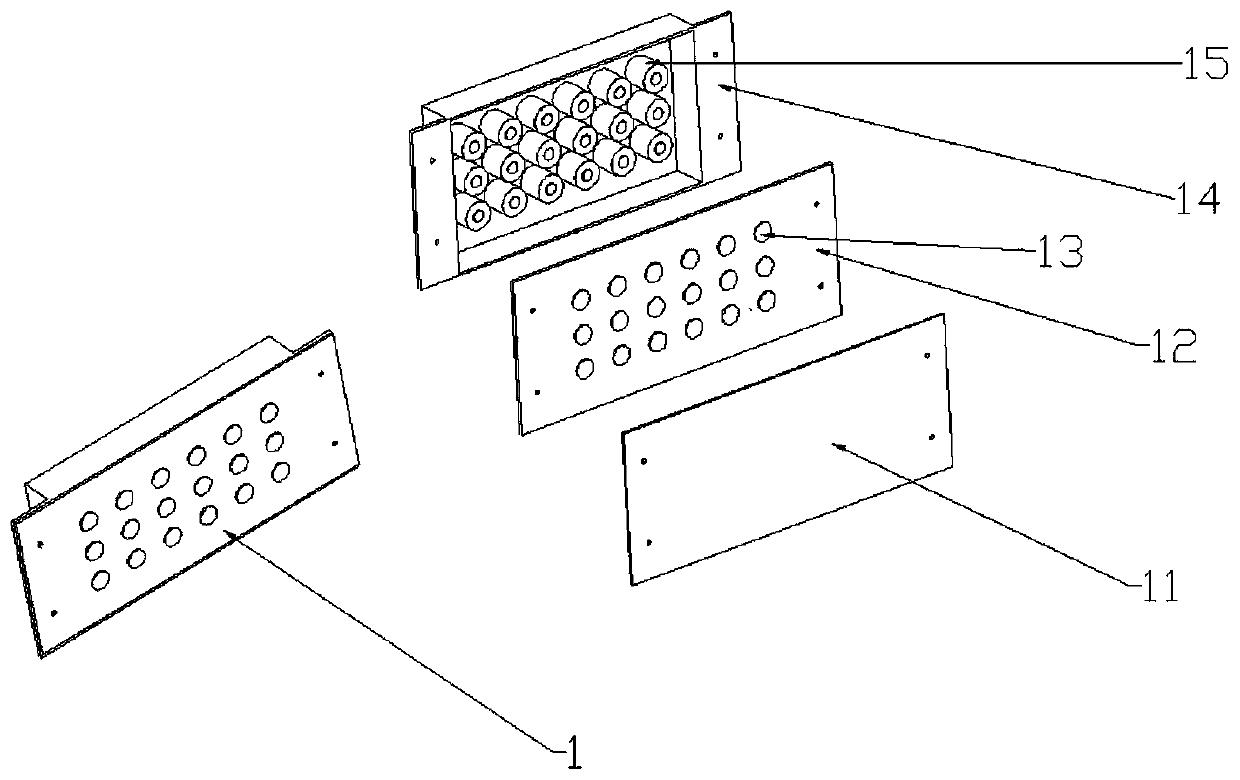
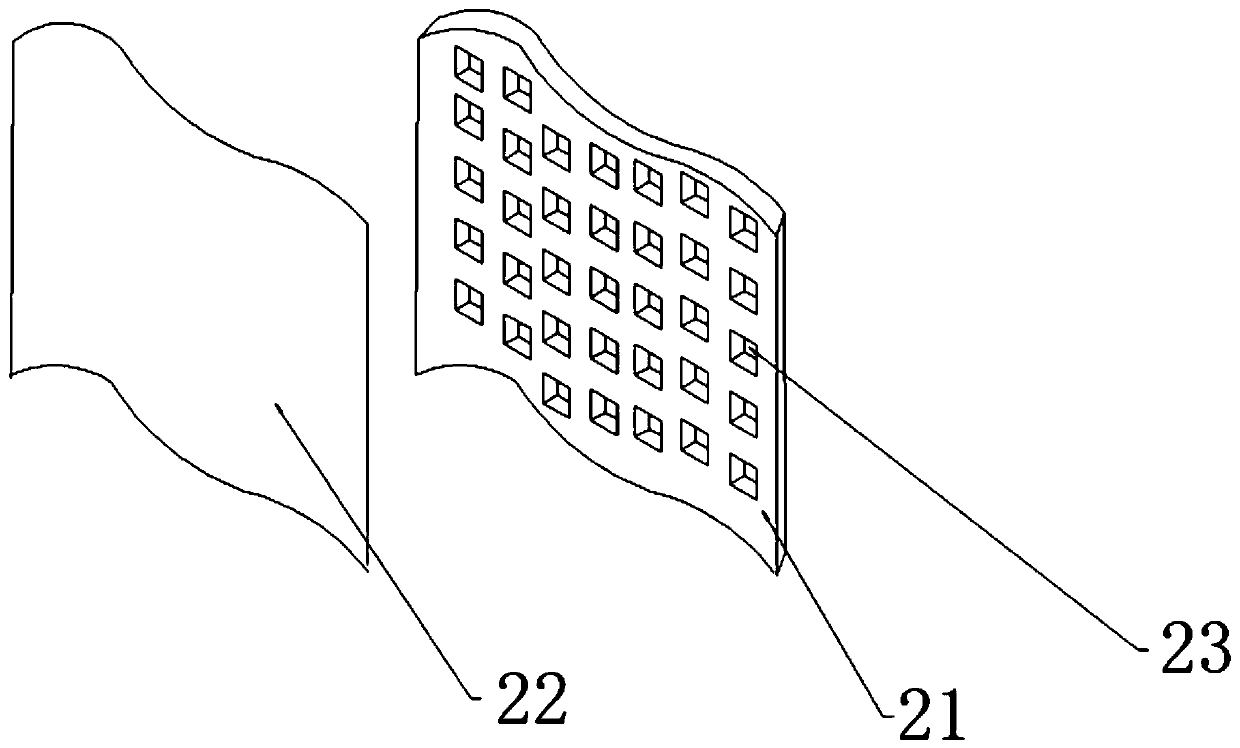
[0025] An embodiment of the present invention provides a flexible magnetic net type mechanical grabbing device, such as figure 1 As shown, it includes: a magnet plate 1, a flexible net 2, a positioning magnet block 3, a support frame 4, a gear arm group 5, a motor 6, a mechanical claw bracket 7, and a three-joint belt transmission mechanical arm. Among them, the three-joint mechanical arm with transmission is composed of a first joint 10, a second joint 9, and a third joint 8, such as Figure 7 shown.
[0026] Regarding the first joint 10, the first joint control motor 101 is connected to the left main arm 104 through a flange, the first joint transmission shaft 103 is fixedly connected to the left main arm 104 and the right main arm 105, and the lef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More