

Multi-task mechanical arm posture detecting and error compensating method
An error compensation and robotic arm technology, applied in the field of industrial robots, can solve the problems of not proposing a pose error compensation algorithm, not getting accurate enough poses, and not considering differences, etc., to achieve convenient design, small amount of data, and accurate measurement Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
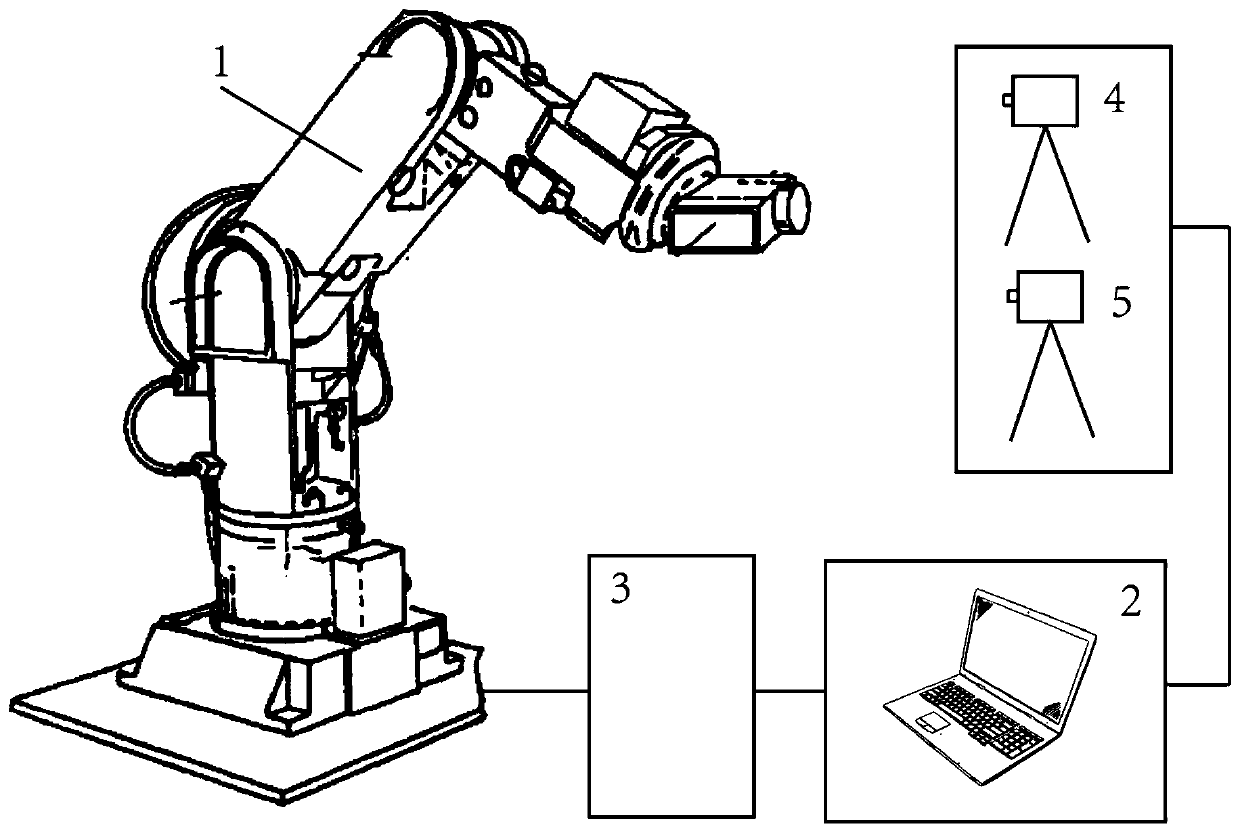
[0045] see figure 1 , the device used in the multi-task manipulator pose detection and error compensation method of this embodiment includes dual cameras (camera 4 and camera 5), six-joint manipulator 1, host computer 2 and manipulator control cabinet 3.
[0046] Two cameras are respectively installed on both sides of the six-joint robotic arm 1 to collect the image information of the robotic arm and transmit it to the host computer 2 to obtain the pose information of the robotic arm. The six-joint mechanical arm 1 is used to complete welding, parts assembly and cargo handling. The host computer 2 is used for image calibration and processing, task mode selection and data calculation. The manipulator control cabinet 3 is used to receive instructions from the upper computer to realize the control of the manipulator.
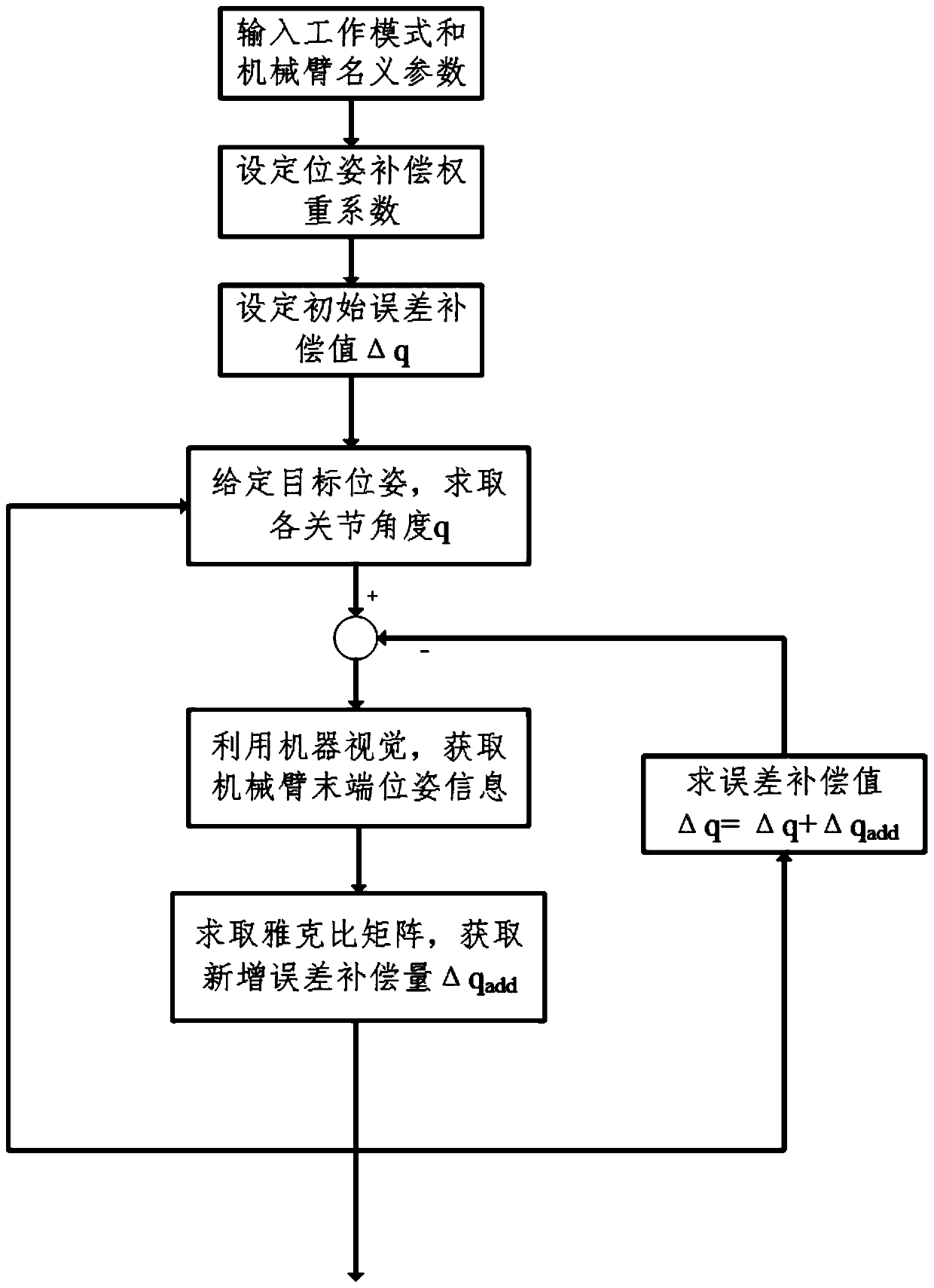
[0047] see figure 2 , the multi-task manipulator pose detection and error compensation method of the present embodiment includes the following steps:
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More