

Distributed multi-AGV dynamic task allocation and path planning method and system
A path planning and dynamic task technology, applied in the direction of electric/hybrid power, comprehensive factory control, instruments, etc., can solve the problems of low efficiency, large calculation amount of path planning, etc., and achieve the goal of improving efficiency, reducing communication traffic, and improving operating efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1 Embodiment example
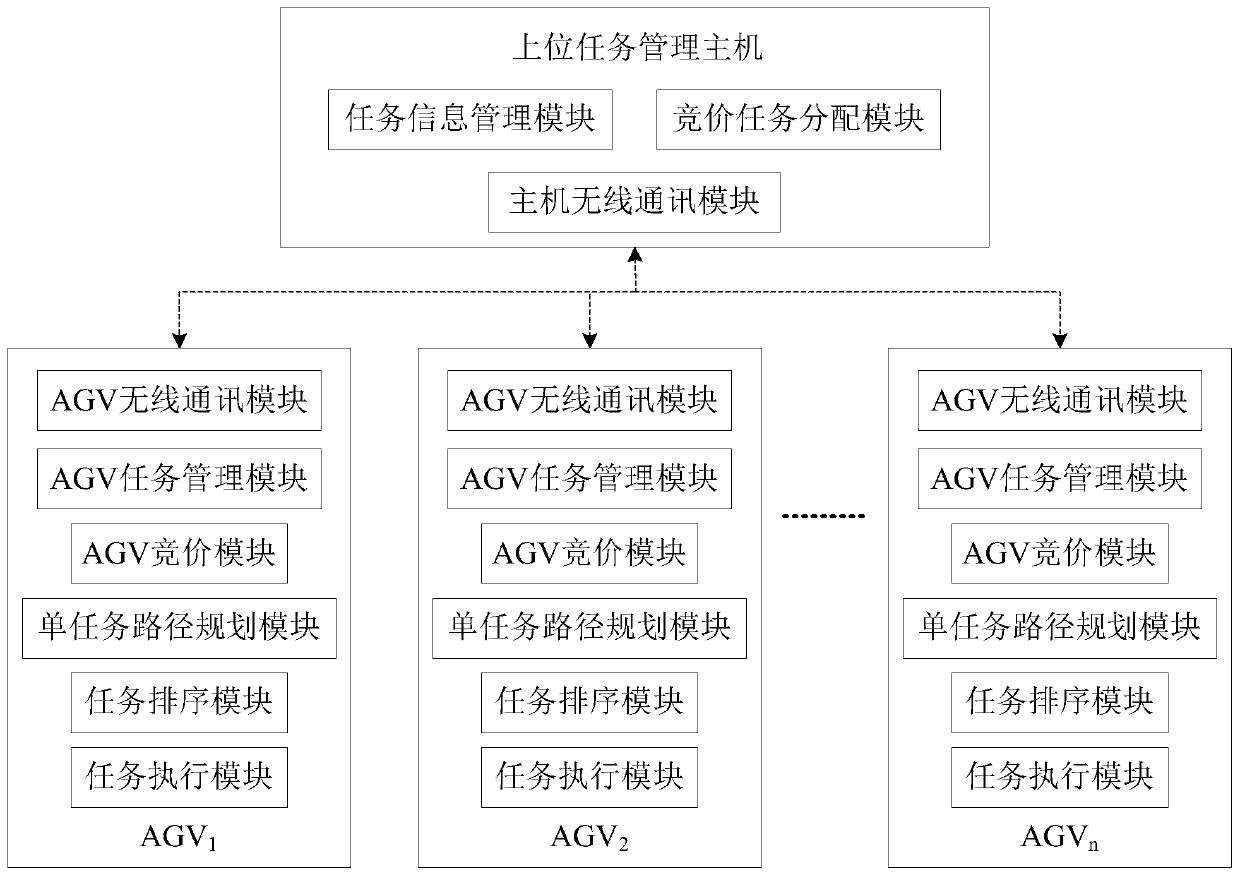
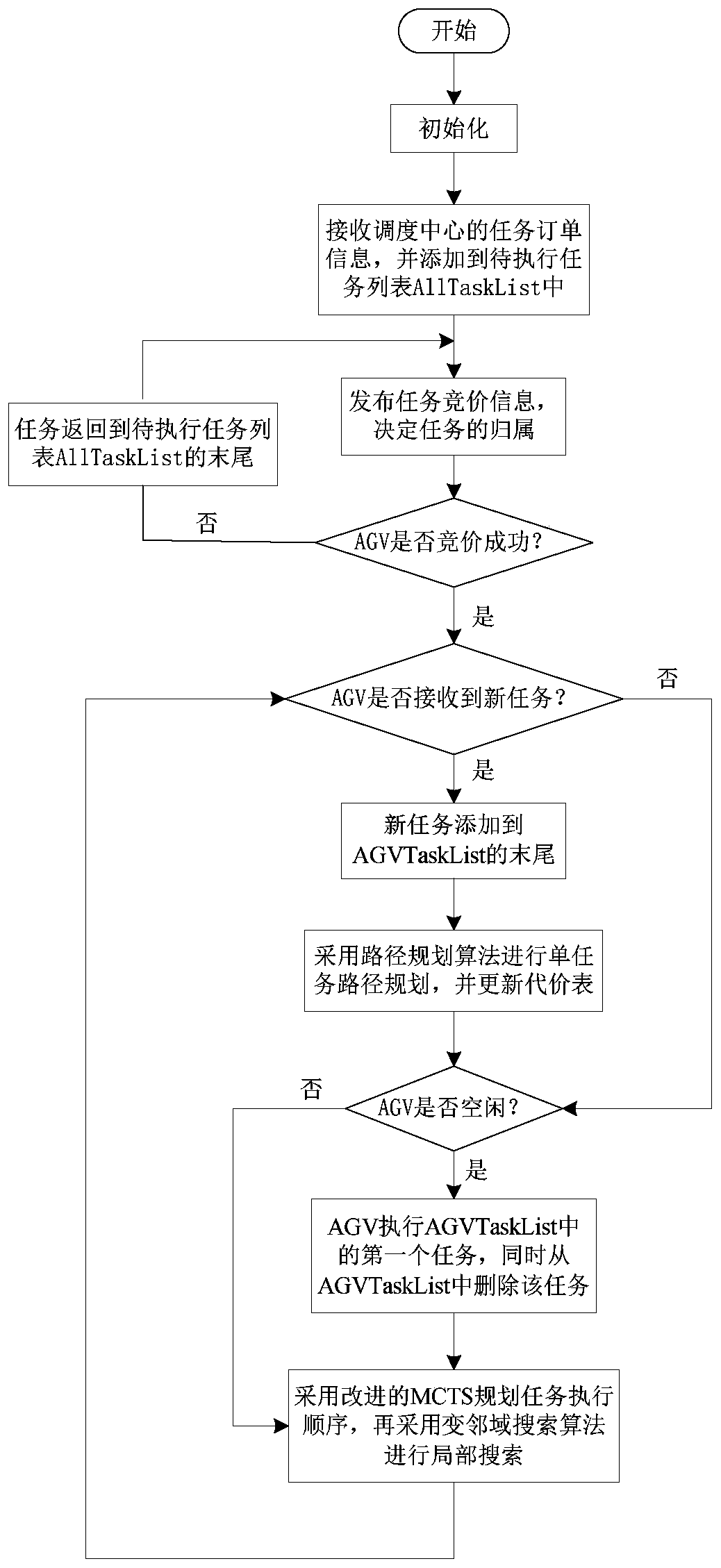
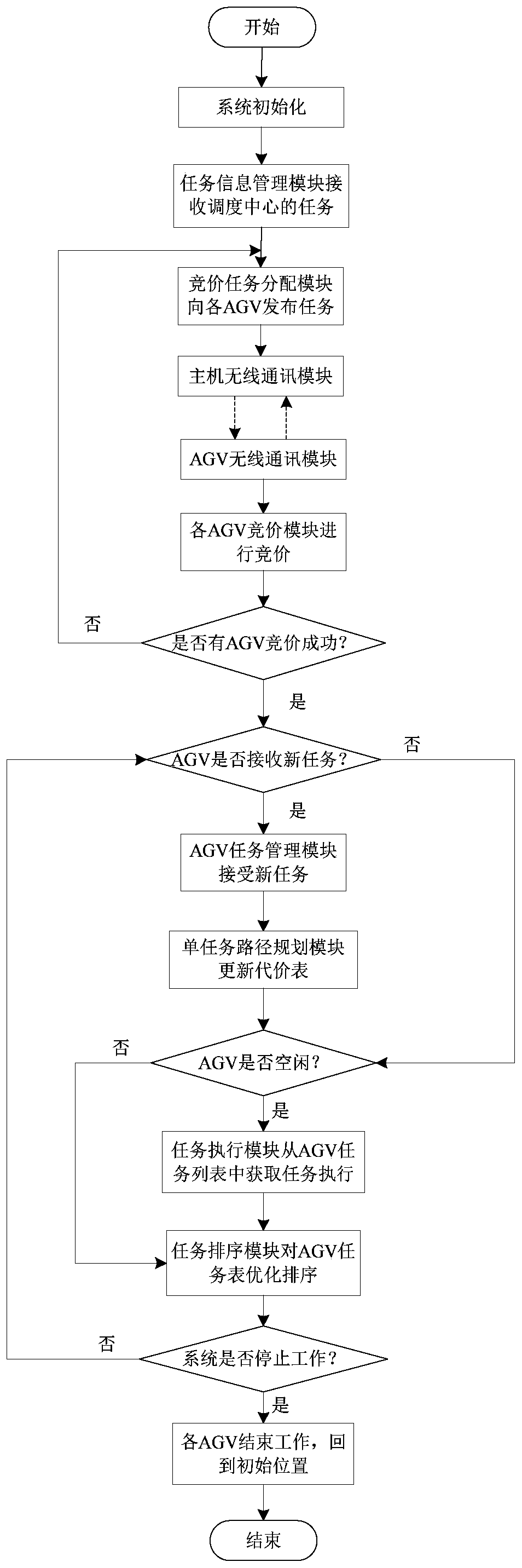
[0061] In this embodiment, a distributed multi-AGV system is constructed based on the application background of multi-AGV in the storage environment. The system mainly includes a host task management host and multiple isomorphic AGVs. The overall structure of the system is as follows figure 1 shown.
[0062] The upper task management host is responsible for task management and distribution. The upper task management host system that realizes this function mainly includes a task information management module, a bidding task assignment module and a host wireless communication module. The functions of each module are as follows:
[0063] (1) The function of the task information management module is to receive and dynamically manage the task order information sent by the dispatch center. Specifically: the received tasks are stored in the task list AllTaskList to be assigned (AllTaskList is a global variable in the upper task management host, which can be dynamically added or del...
Embodiment 2
[0103] Embodiment 2 Simulation experiment analysis
[0104] In order to test the performance of the method proposed in Example 1, in Figure 4 The simulation test is carried out on the warehouse map shown, in which the dark grid represents the shelf, and the light grid represents the feasible area of the AGV. The task refers to moving the goods from one storage location to another. In each simulation, a series of task sets are randomly generated first, each task set contains many tasks (dynamic reception), and the start and end positions of each task are the positions that the AGV can reach without repetition. The AGV starts from its parking position (the lower left grid of the map), performs all tasks one by one, and finally returns to the parking position (the AGV moves one grid per unit time).
[0105] Different task sets correspond to different numbers of tasks. Small task sets usually contain 50 tasks, medium task sets contain 100 tasks, and large task sets contain 200...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More