

Indoor positioning system and method for mobile robot based on multiple depth cameras
A mobile robot and depth camera technology, applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve problems such as large blind spots and complex system construction, and achieve the effect of small blind spots and simple system layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
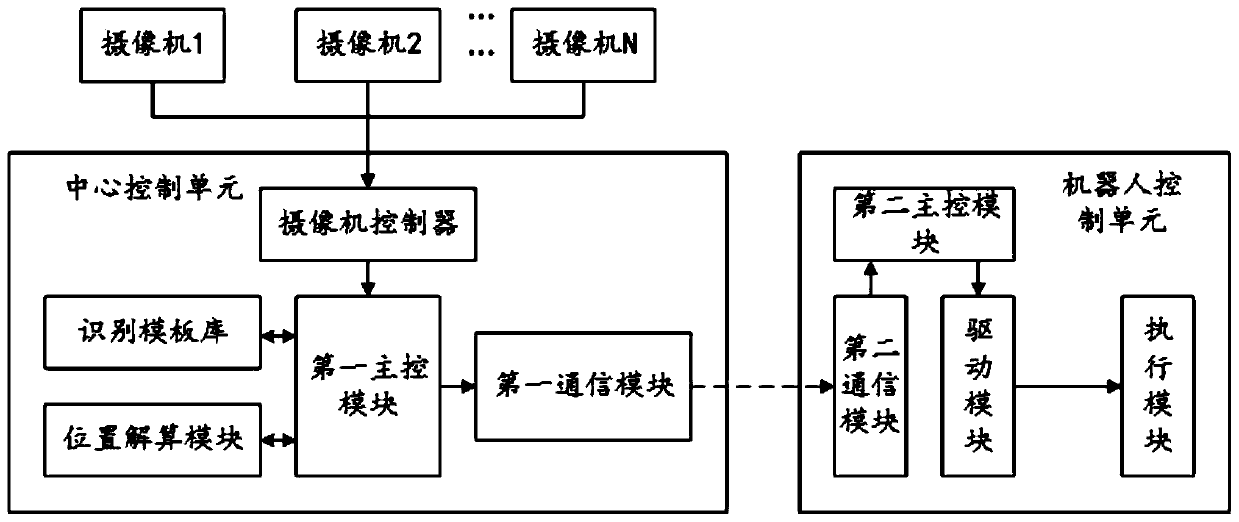
[0032] Such as figure 1 As shown, this embodiment provides a mobile robot indoor positioning system based on multi-depth cameras, which includes a central control unit and a robot control unit, the central control unit is used to locate the position of the robot and send it to the robot control unit, the robot The control unit is used to control the action of the robot according to the positioning information sent by the central control unit;
[0033] The central control unit includes a plurality of cameras installed indoors, a camera controller, a recognition template library, a position calculation module, a first main control module and a first communication module, and the plurality of cameras are all used to photograph the indoor environment, The camera controller is used to receive and process the picture information taken by the multiple cameras, the recognition template library is used to store multiple photos taken by the robot at different angles, and the position ca...
Embodiment 2
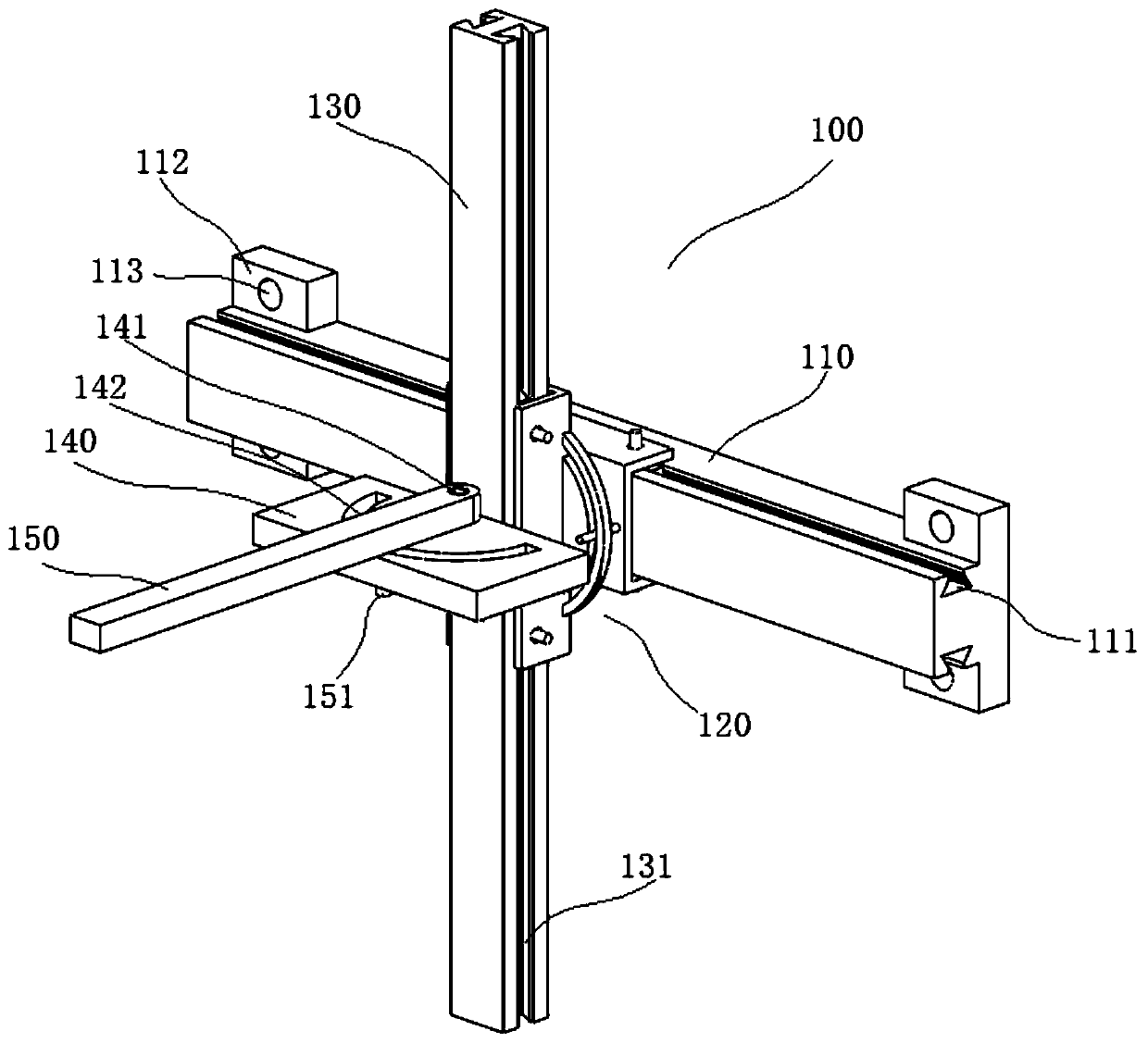
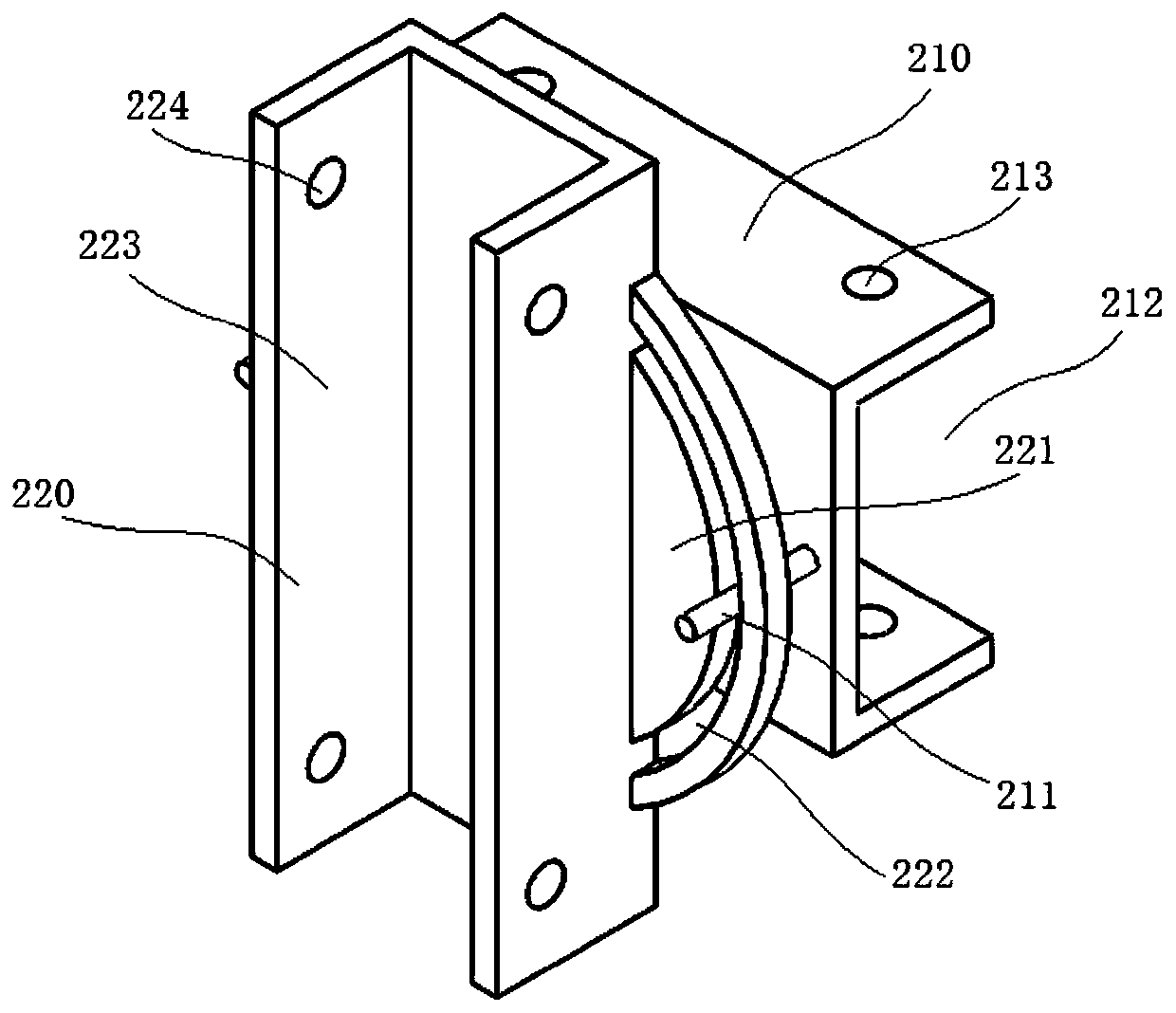
[0053] Such as Figure 2-8 As shown, this embodiment provides a camera bracket, which can be preferably used to install and fix the camera in Embodiment 1, and it can preferably adjust the position of the camera after installation, so that it can be more It is convenient to debug the shooting range of the camera, so as to realize the monitoring of the room without dead angle.
[0054] combine figure 2 Shown is a schematic diagram of the camera bracket in this embodiment. It includes a bracket body 100, the bracket body 100 includes a first slide bar 110 for installation on the wall, the first slide bar 110 is slidably provided with a rotating assembly 120; the rotating assembly 120 is slidably provided with a second The sliding bar 130 and the rotating assembly 120 are used to realize the relative rotation between the first sliding bar 110 and the second sliding bar 130; the second sliding bar 130 is provided with a tray 140, and the tray 140 is hinged with a camera mountin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More