

Candidate road section screening method based on grid segmentation and grid segmentation method
A grid segmentation and road section technology, applied in the field of map matching, can solve the problems of repeated nodes, the inability to accurately know the node index relationship and topology relationship, etc., and achieve the effect of reducing resource waste, increasing application value, and speeding up matching efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0025] A grid segmentation method, comprising the steps of:
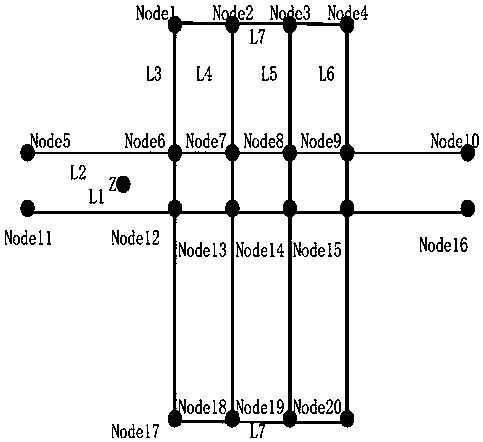
[0026] Step 1: Obtain the road network data in the map, including all road section information in the map and the latitude and longitude coordinate data of nodes contained in each road section, such as figure 1 As shown, the following non-repetitive node latitude and longitude coordinate data node coordinates Node (lon, lat) are stored in the set List, lon is the longitude value, lat is the latitude value, and Node (lon, lat) is stored in the List set, List The collection contains the following node coordinate data:
[0027] Node1(108.995421,34.277973), Node2(108.995528,34.277970),
[0028] Node3(108.995694,34.277963), Node4(108.995784,34.277966),
[0029] Node5(108.994941,34.277561), Node6(108.995424,34.277567),
[0030] Node7(108.995531,34.277571), Node8(108.995694,34.277574),
[0031] Node9(108.995788,34.277574), Node10(108.996141,34.277571),
[0032] Node11(108.994944,34.277444), Node12(108.995415,34.277447...
Embodiment 2
[0061] On the basis of embodiment 1, a method for screening candidate road sections based on grid segmentation is disclosed, comprising the steps of:
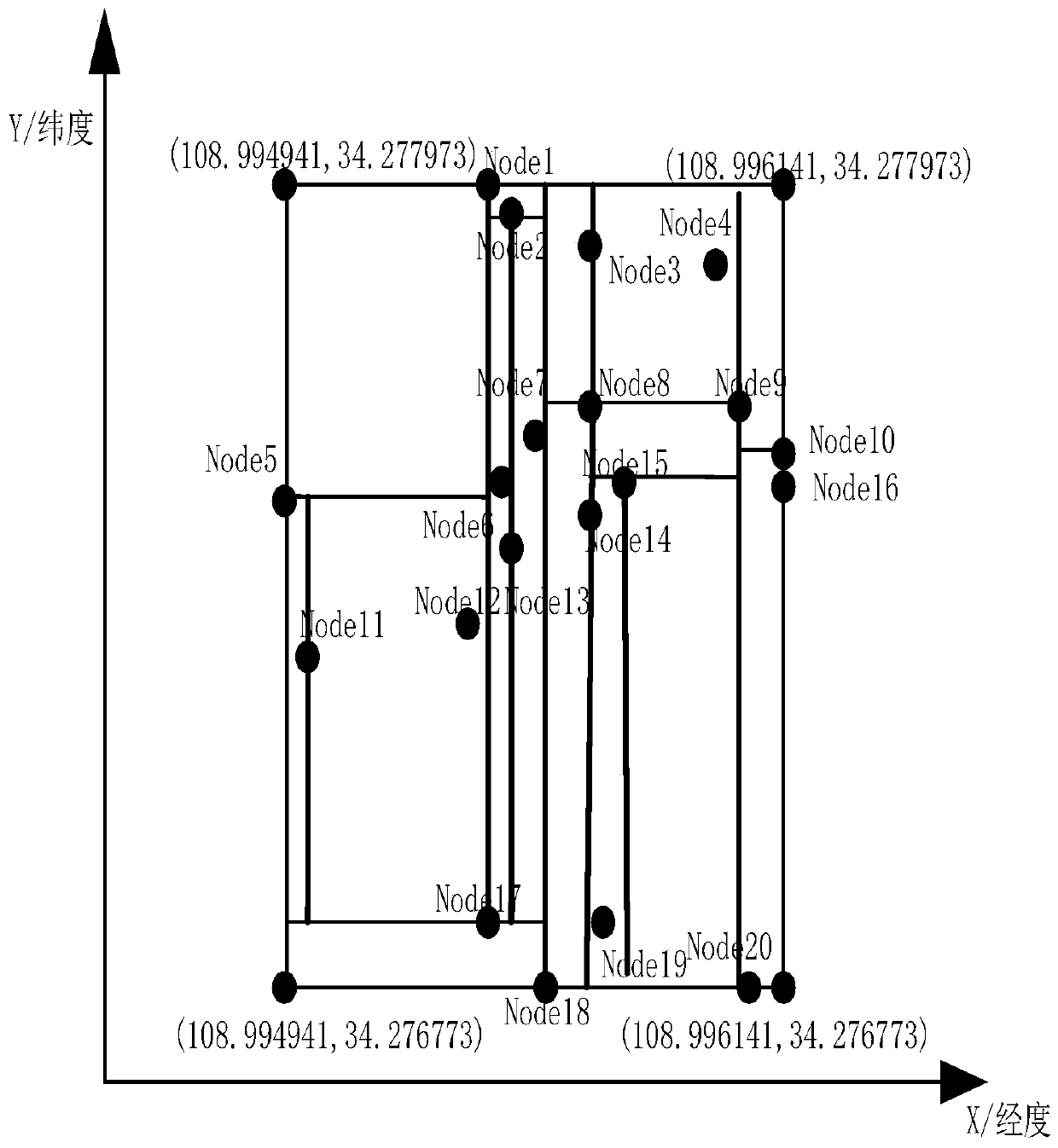
[0062] Step 1: Utilize the grid segmentation method as claimed in claim 1 to segment the map containing the candidate road sections to establish a grid, and use the sub-nodes of all levels in order from small to large, and use the same level of sub-nodes as the same level index, and two adjacent The first-level child nodes are used as adjacent two-level indexes to construct the index relationship between the root node and all child nodes;
[0063] Step 2: Obtain the latitude and longitude coordinates (108.995220, 34.277515) of the current GPS track point Z, traverse the index relationship from the root node, find the node closest to the GPS track point Z, and obtain the α nodes closest to the track point Z;
[0064] according to Figure 4 Find the node closest to Z. The traversal process is similar to the split process. Compar...
Embodiment 3
[0074] A grid segmentation method, comprising the steps of:
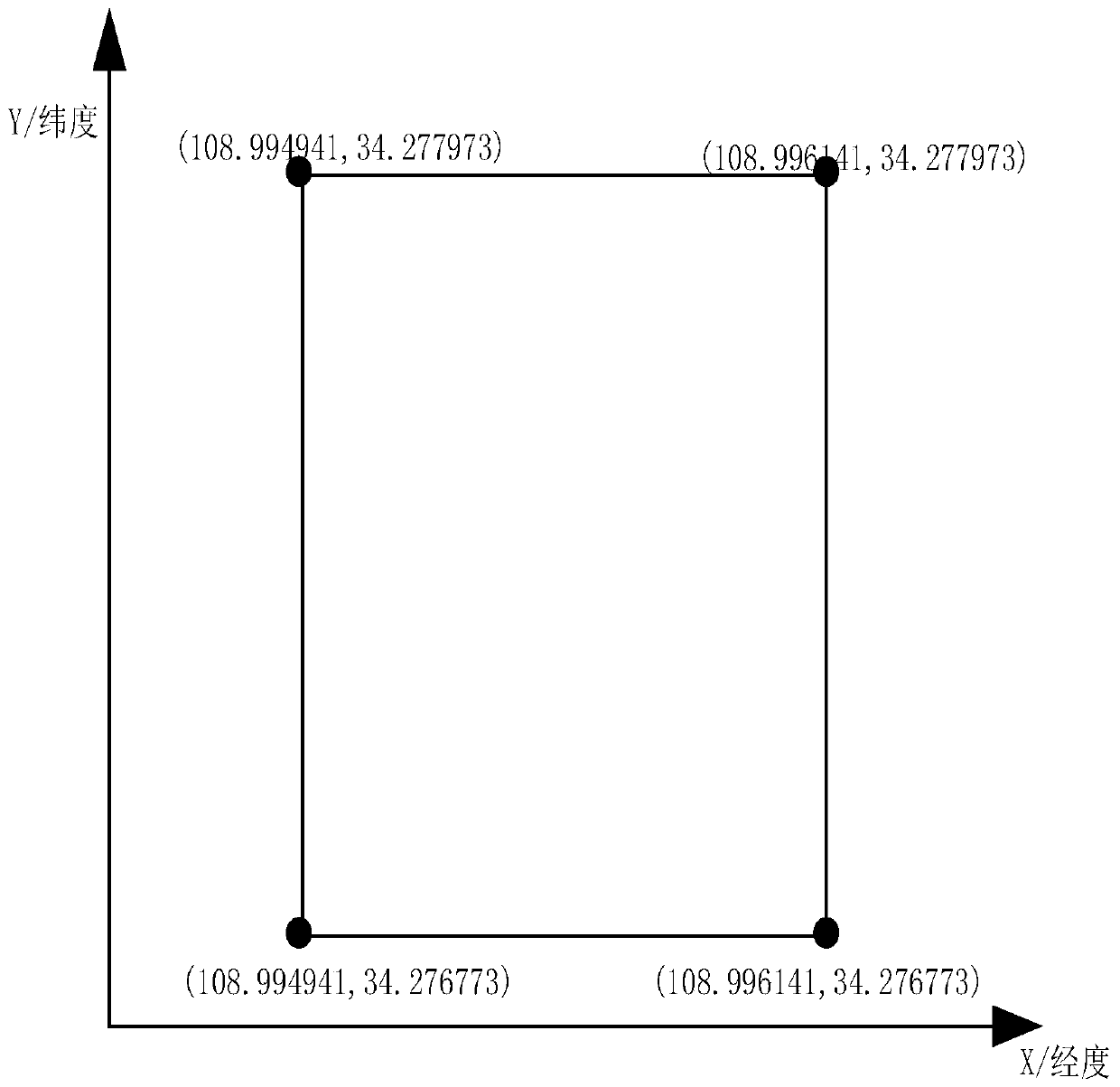
[0075] Step 1: Obtain the road network data in the map, including all road section information in the map and the node latitude and longitude coordinate data contained in each road section, construct a two-dimensional space coordinate system according to the node latitude and longitude coordinate data, and obtain the maximum value of longitude and latitude in the node coordinates , use the point with the minimum value of latitude and longitude as the lower left point of the grid, and the point with the maximum value of latitude and longitude as the upper right point of the grid to construct the largest grid;
[0076] Step 2: Obtain the latitude average value of the latitude and longitude coordinate data of all nodes, take the node whose latitude value is closest to the latitude average value among all nodes as the root node, use the root node as the split point, and use the latitude value of the root node to linearly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More