

Dynamic adjusting device, dynamic adjusting system and using method of system
A technology for dynamic adjustment and adjustment of components, applied in surgical navigation systems, medical science, surgical manipulators, etc., can solve the problems of low positioning accuracy and large cumulative error, and achieve the effect of simple structure, small size, and saving operating room space.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
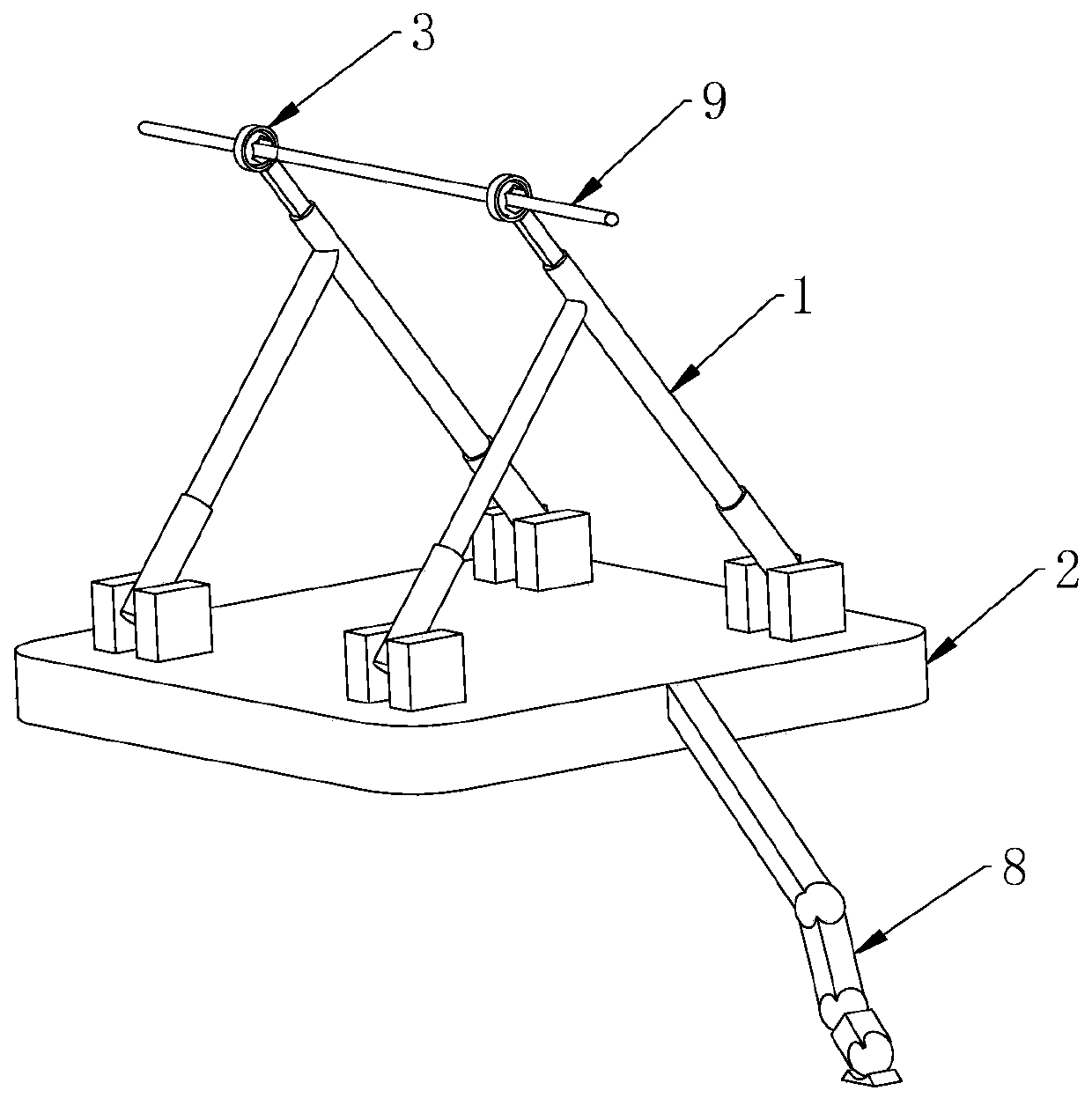
[0030] Such as figure 1 As shown, Embodiment 1 of the present invention provides a dynamic adjustment device 10, including at least two groups of adjustment components in different planes; each group of adjustment components includes at least two telescopic members 1, and one end of at least two telescopic members 1 is hinged on Connect the platform 2, the other ends of at least two telescopic parts 1 are hinged to each other, the other end of at least one telescopic part 1 in each group of adjustment assemblies is also connected with a ball joint structure 3, and at least two telescopic parts in another group of adjustment assemblies One end of 1 is hinged on the same connecting platform 2.
[0031] The dynamic adjustment device 10 provided by the present invention is provided with adjustment components in different planes, by hinged telescopic parts 1 on the connection platform 2 and connecting the ball joint structure 3 to one end of the telescopic part 1, and can pass thro...
Embodiment 2
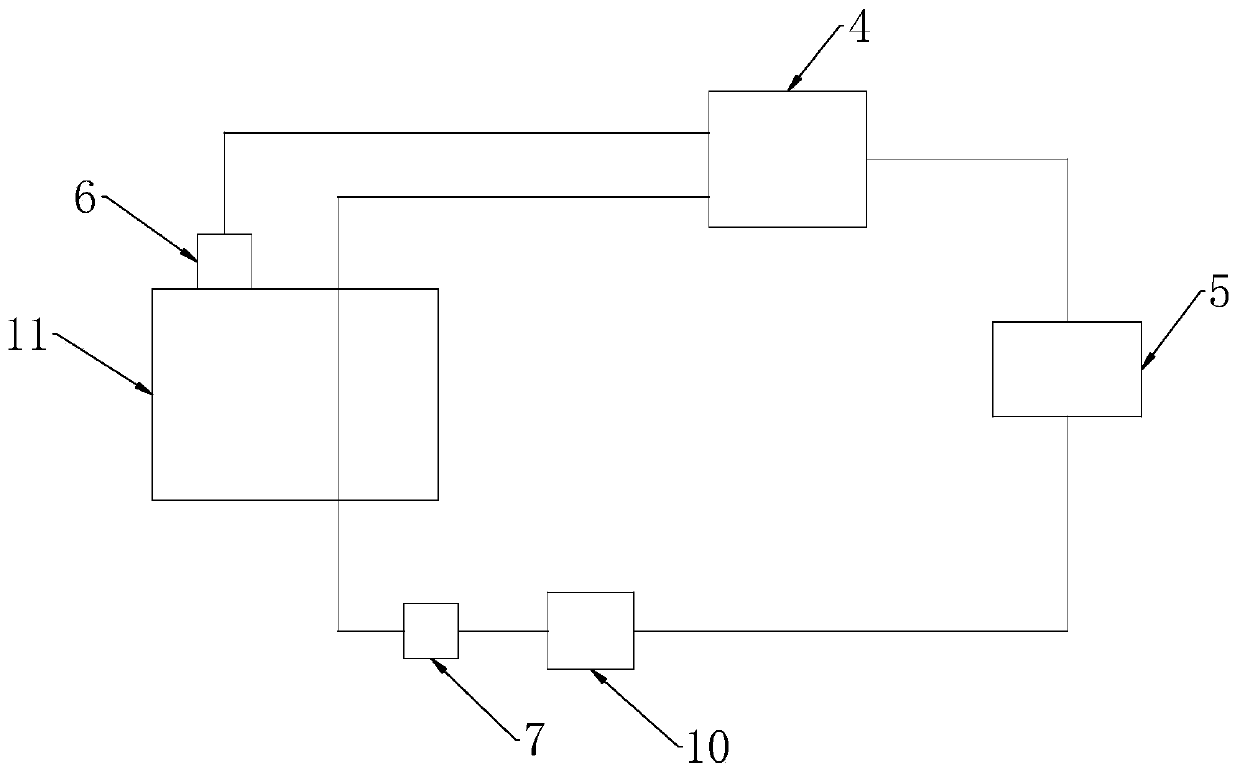
[0041] Such as figure 2 As shown, Embodiment 2 of the present invention provides a dynamic adjustment system, including a positioning device, a tracking device 4, a control device 5, and a dynamic adjustment device 10 as in Embodiment 1; the positioning device is used to locate the target position and generate a position signal, the tracking device 4 communicates with the positioning device and the control device 5 respectively, and sends the position signal to the control device 5, and the control device 5 controls the dynamic adjustment device 10 to move to the target position according to the position signal.
[0042] In the dynamic adjustment system provided by Embodiment 2 of the present invention, by setting the dynamic adjustment device 10 in Embodiment 1 in the dynamic adjustment system and applying the dynamic adjustment system to a multi-degree-of-freedom passive surgical adjustment mechanism, the dynamic adjustment system can be used The device 10 compensates the e...
Embodiment 3
[0050] Embodiment 3 of the present invention provides a method for using the dynamic adjustment system in Embodiment 2, including the following steps:
[0051] S1, acquiring the spatial position point of the target object 11 and the direction position point of the target object 11, and marking the spatial position point and the direction position point in the space coordinate system formed by the first positioning member 6;
[0052] In this step, first obtain the spatial position point A of the target object 11 and the direction position point B of the target object 11, then obtain the spatial position point A and the direction position point B of the target object 11 through the tracking device 4, and then locate the first The part 6 is fixedly connected to the target object 11, for example, the first positioning part 6 can be connected to the patient, and then the spatial position point A and the direction position point B of the target object 11 are marked in the spatial coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More