

Linear inverted pendulum model-based robot gait planning method
A linear inverted pendulum and gait planning technology, applied in the direction of instruments, motor vehicles, two-dimensional position/channel control, etc., can solve problems such as large errors and affecting the stability of robots, and achieve improved stability and rationality , Robot dynamics model accurate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
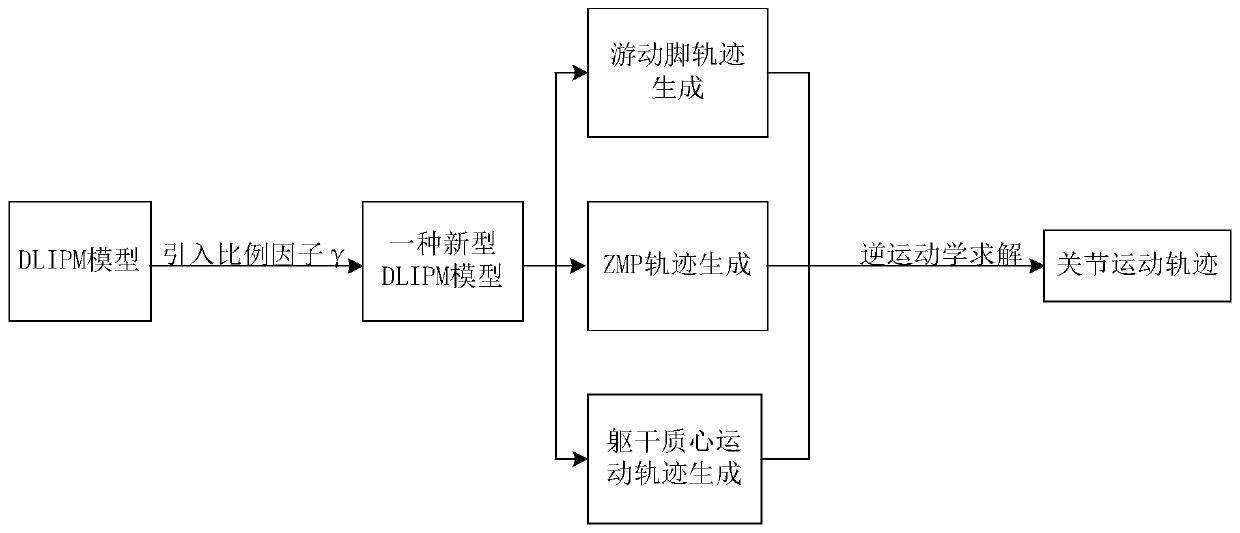
[0023] to combine figure 1 , the present invention a kind of robot gait planning method based on linear inverted pendulum model, comprises the following steps:
[0024] Step 1. Construct a linear inverted pendulum model based on the double-link inverted pendulum model;
[0025] Step 2. Perform gait planning based on the linear inverted pendulum model, generate the trajectory of the zero moment point, the trajectory of the center of mass of the trunk, the planned trajectory of the swimming foot, and solve the gait motion curve of each joint.
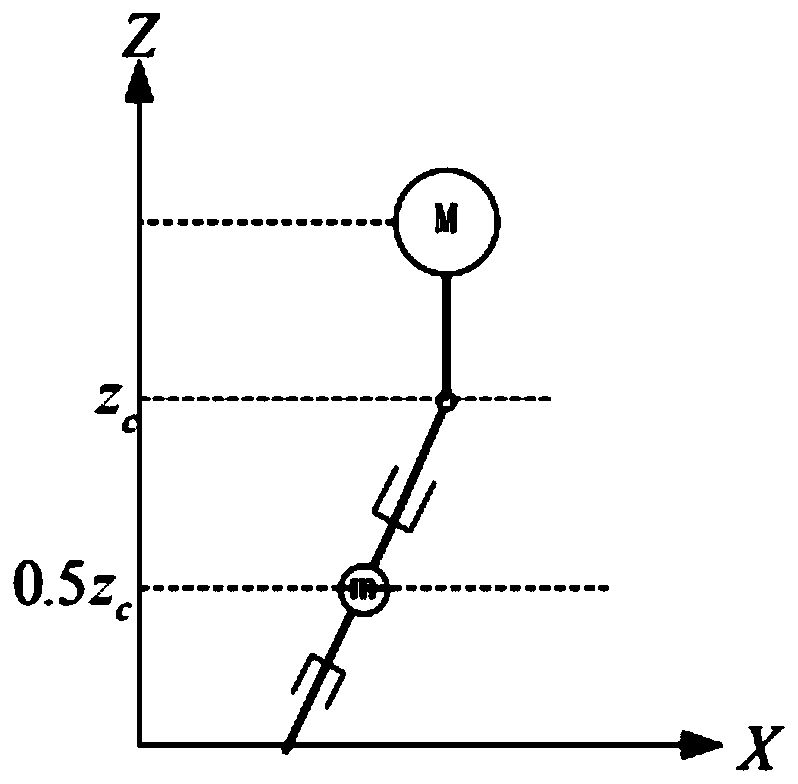
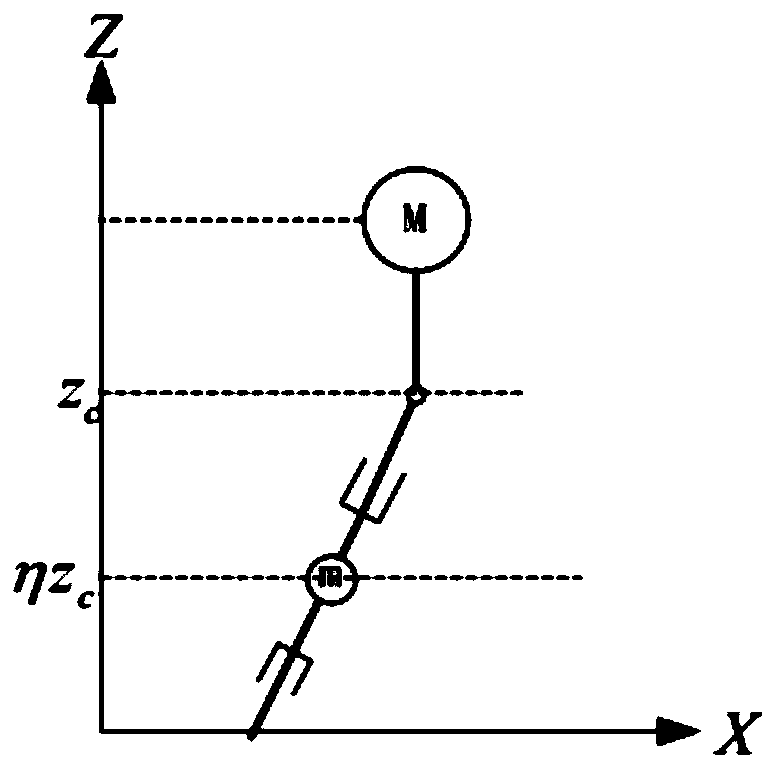
[0026] Further, the linear inverted pendulum model is constructed based on the double-link inverted pendulum model described in step 1, specifically:
[0027] Generally, the double-link inverted pendulum model used in the gait planning algorithm considers that the mass of the robot is divided into two parts. The mass is concentrated at point m of the double-link inverted pendulum, such as figure 2 shown.
[0028] According to the act...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More