Threading cable centering device, S-shaped mechanical arm and application method of S-shaped mechanical arm
A technology for centering device and cable, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high precision requirements for wire hole processing, shortened cable life cycle, cable wear, etc. The effect of reduced precision requirements, reduced drive force, easy removal and replacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0064] The snake-arm robot is a super-redundant robotic arm driven by cables. The main structure includes linear guides, drive packages, bases, snake arms, cables, universal joints and end effectors. The base is fixed on the drive package, and all the driving of the snake arm robot is done by stretching the cables in the drive package, wherein each snake arm is driven by 3 cables evenly distributed at 120°.
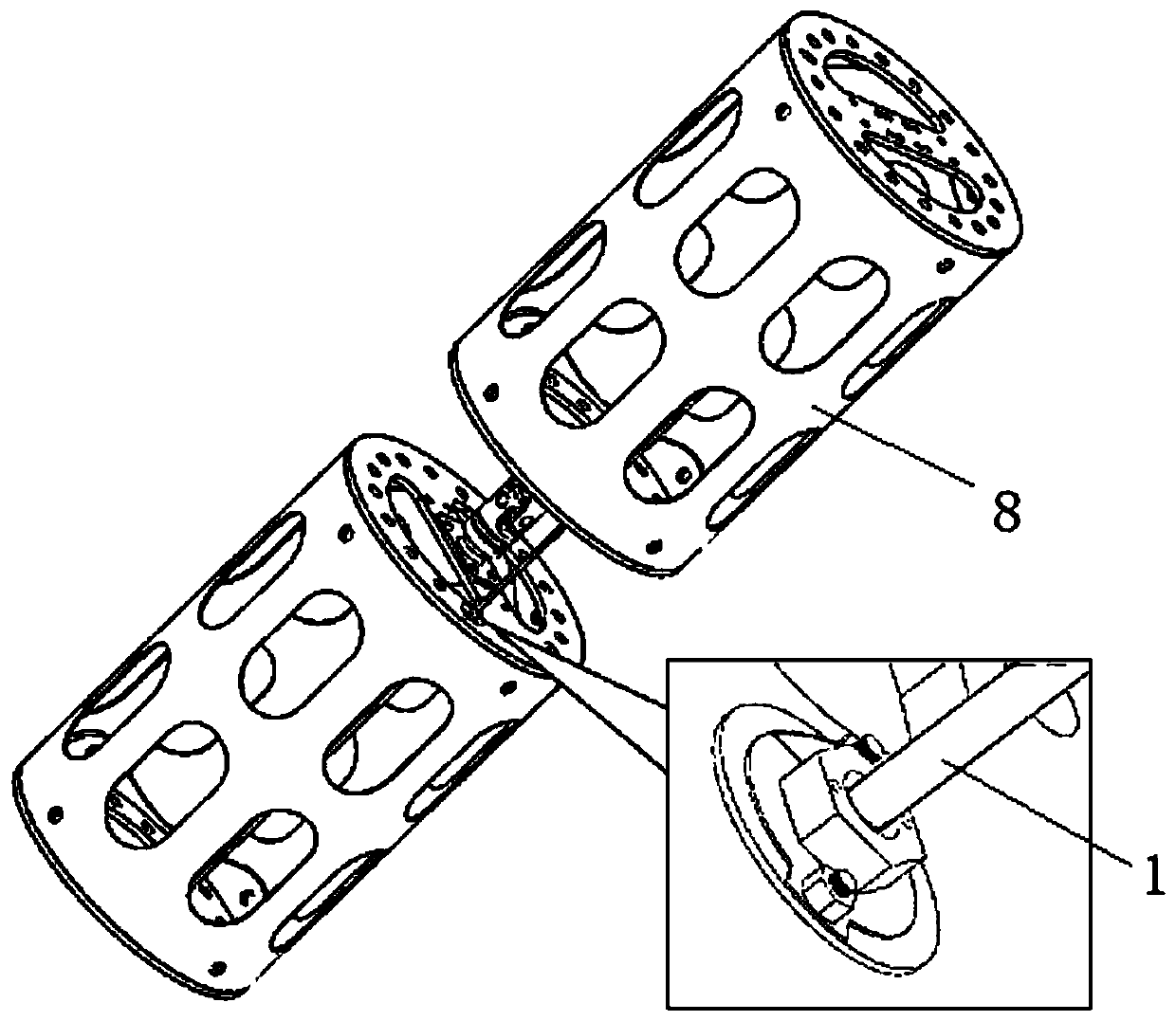
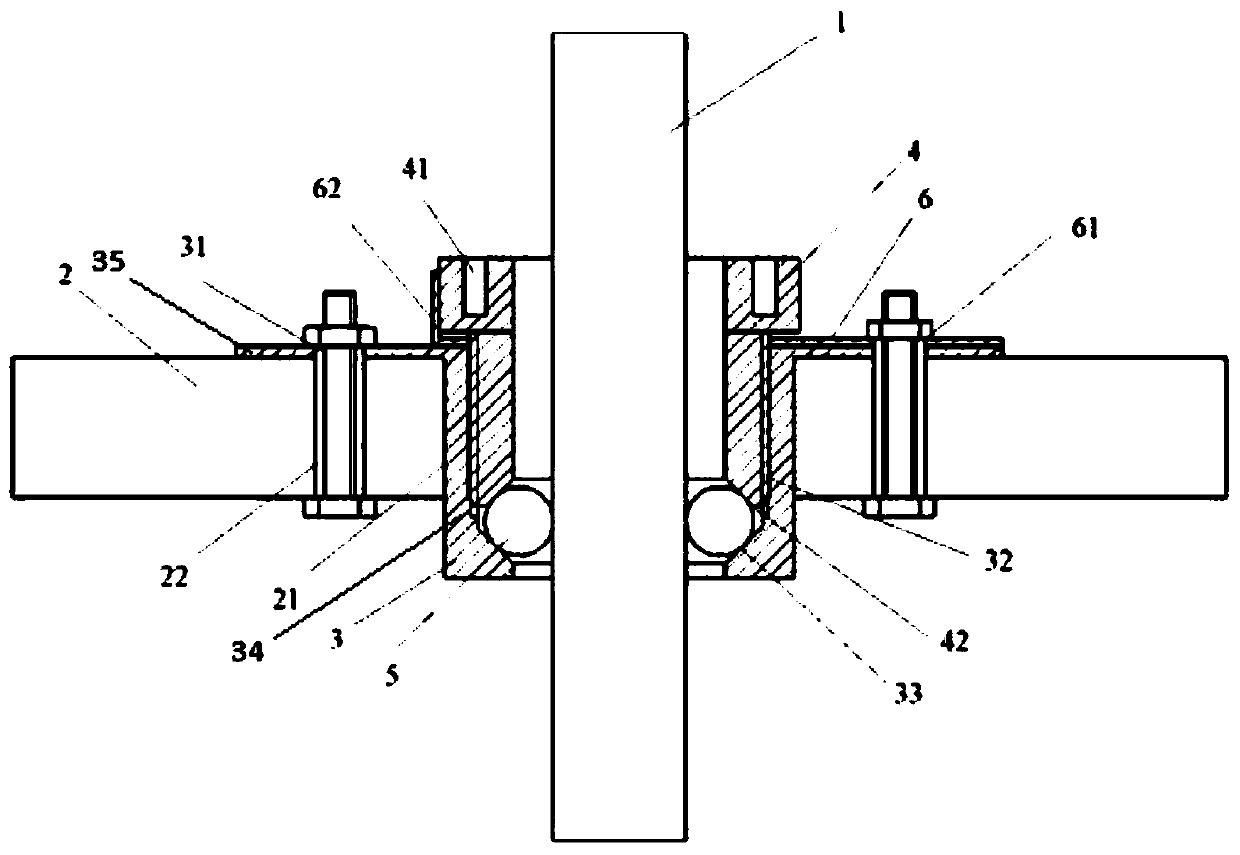
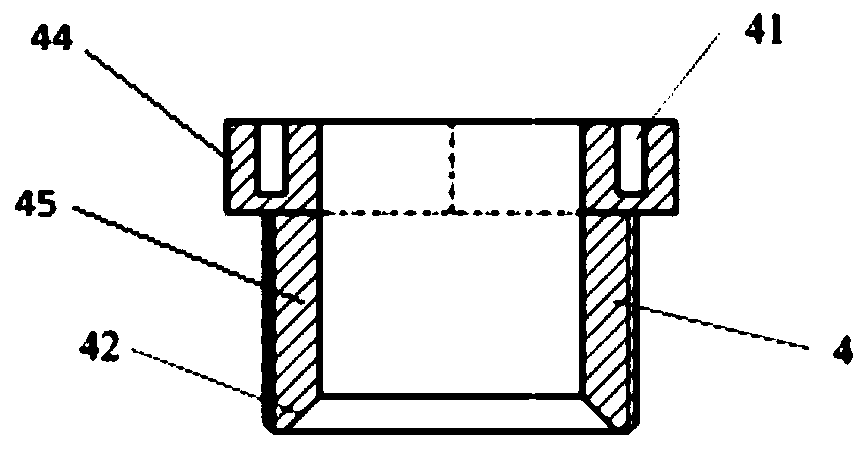
[0065] The present invention provides a via hole cable centering device for a wire-driven robot (snake-shaped arm robot). figure 1 For some two segments 8 of the line-driven snake-arm robot, the effect diagram of the installation of the device, figure 2 It is a partial cross-sectional view of the structure of the device. The complete device includes a fixing structure 3 , an adjusting structure 4 , a ball 5 and an anti-loosening washer structure 6 . Also in figure 1 Among them, the cable 1 is the cable to be passed through the cable hole 21 , and the cable hole 21 is a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More