U-shaped automatic turning control system and U-shaped automatic turning control method in autopilot
A technology of automatic driving and control method, applied in the field of automatic driving, can solve problems such as difficult to complete U-turn operation, achieve the effect of improving road adaptability and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
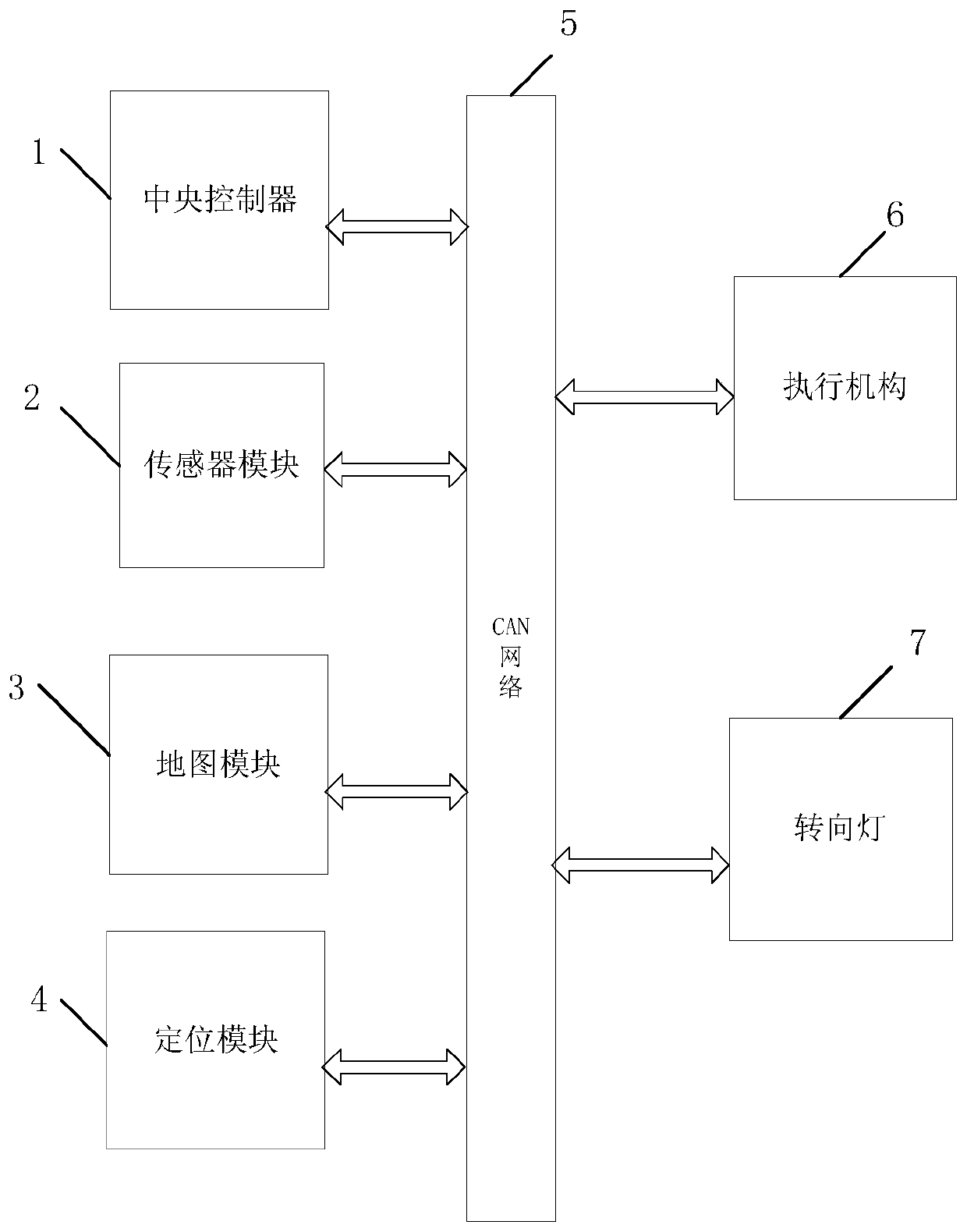
[0037] U-turn control system such as figure 1 As shown, it includes a central control unit 1, a sensor module 2, a map module 3, a positioning module 4, a CAN network module 5, an actuator module 6, a turn signal module 7, and the like.
[0038] The sensor module 2 is used to detect obstacle information. In this embodiment, the sensor module 2 uses sensors such as ultrasonic waves and millimeter waves. The ultrasonic radar is mainly used for detecting short-distance obstacles during the U-turn process. The front and rear of the car detect the obstacle information in front and behind. The sensor can adopt various types of sensors used in existing smart cars, and can directly send the collected targets to the CAN bus, and the central control unit can directly read the target information from the CAN bus.
[0039] The map module 3 uses a high-precision map, which is collected and made by the automatic driving. The high-precision map needs to preset the U-turn area, and number ...
Embodiment 2
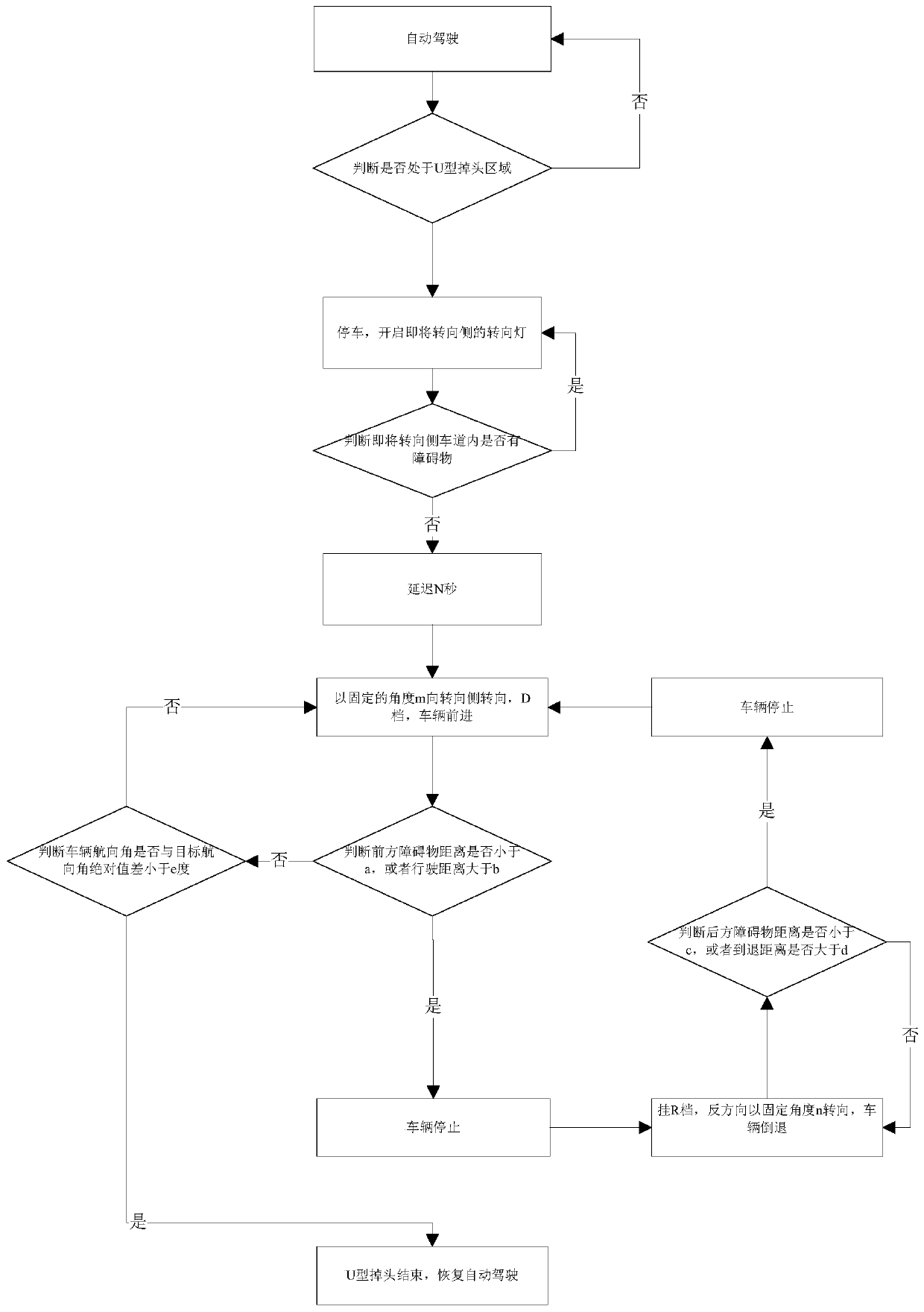
[0045] For a method of performing a U-turn using the above system, see figure 2 , including the following steps:
[0046] Step 1. The vehicle is in the automatic driving mode, and the horizontal and vertical directions are automatically controlled by the central control unit 1 .
[0047] Step 2, the central control unit 1 judges whether the vehicle has entered the U-turn area by reading the high-precision map and positioning information of the map module 3 and the positioning module 4 .
[0048] Step 3. When entering the U-shaped U-turn area, the central control unit 1 sends a parking command to the actuator 6, the vehicle stops and waits, and at the same time, the turn signal 7 sends a control signal to remind the personnel on the vehicle and other vehicles on the road to drive automatically The vehicle is to make a U-turn.
[0049] Step 4, the sensor module 2 judges whether the road in the direction of the U-turn meets the U-turn condition, that is, whether there is an ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com