

Robot wrist and robot
A robot and wrist technology, applied in the field of robotics, can solve the problems that the three axes cannot intersect at one point, the length of the wrist is long, etc., and achieve the effects of improving the degree of visualization, shortening the line, and facilitating the installation and maintenance process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail below in conjunction with the accompanying drawings and preferred embodiments.
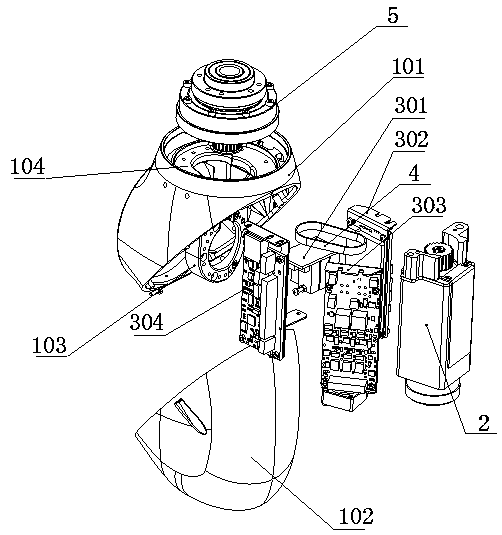
[0032] refer to figure 1 As shown, a robot wrist includes a wrist body, the wrist body has a terminal flange connection end, and an n-1 axis reducer mounting frame 103 perpendicular to the terminal flange connection end is provided in the wrist body. - The 1-axis reducer mounting frame 103 divides the inner space of the wrist body into a first chamber and a second chamber; the wrist body is located on the side of the first chamber relative to the n-1 axis reducer mounting frame 103 is provided with an n-2 axis connecting rod interface; the n-1 axis reducer perpendicular to the n-1 axis reducer mounting frame 103 is installed in the first chamber, and the n-1 axis reducer is installed in the second chamber The n-axis drive motor 2 of the mounting frame 103, and the output end of the n-axis drive motor 2 faces the end flange connecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More