

Singular perturbation composite learning control method of elastic aircraft based on interference observation
A singular perturbation and learning control technology, applied in the field of aircraft control, can solve problems such as the inability to guarantee the system control accuracy, the decline of the system control accuracy, and the breakage of the body.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0123] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
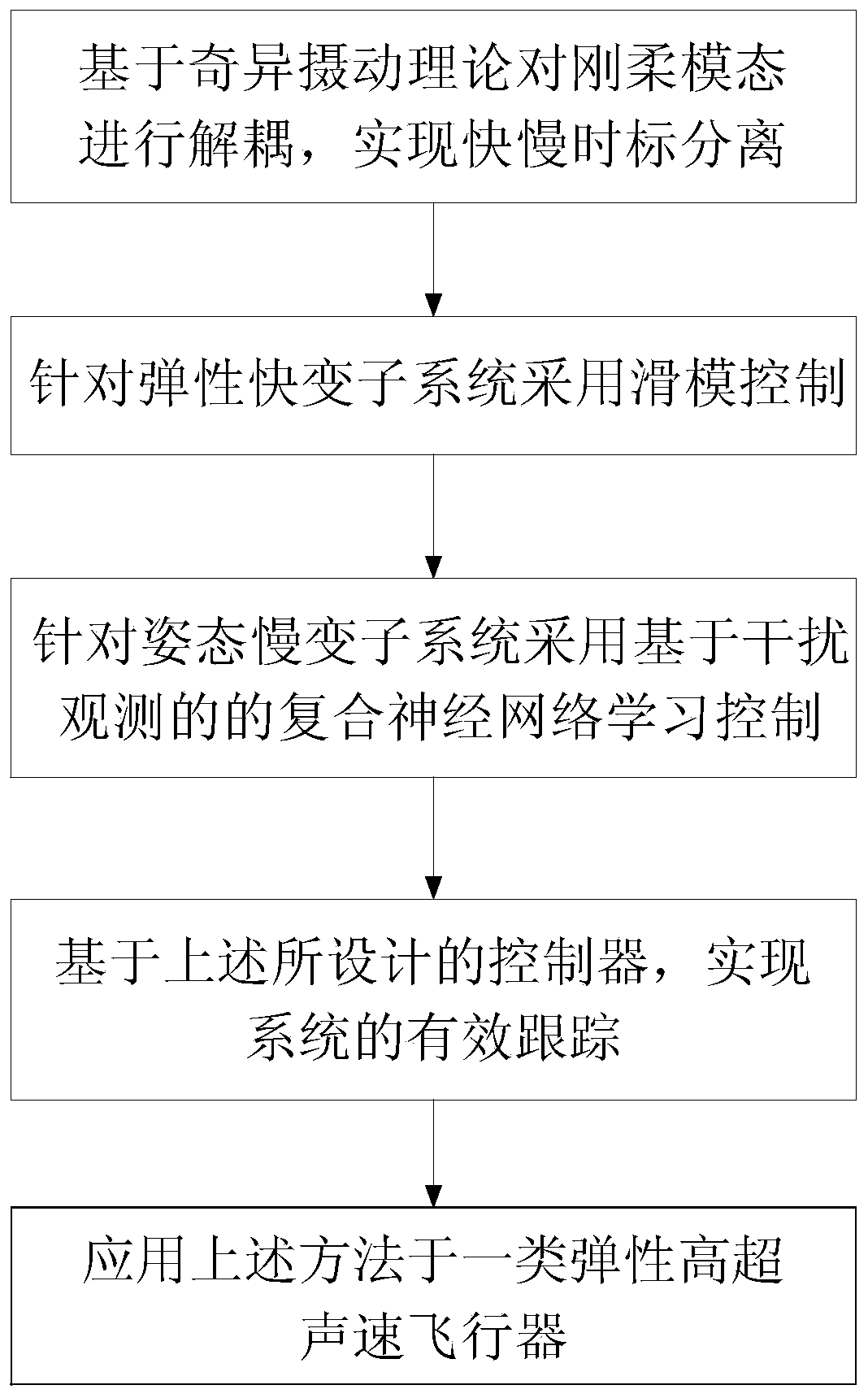
[0124] refer to figure 1 , the invention's singular perturbation compound learning control method for elastic aircraft based on disturbance observation is applied to a class of elastic hypersonic aircraft, and is realized by the following steps:
[0125] (a) Consider the dynamic model of the longitudinal channel of the elastic vehicle:
[0126]
[0127]
[0128]
[0129]
[0130]
[0131]
[0132] The kinematic model is composed of seven state quantities and two control inputs U=[δ e ,Φ] T composition. Among them, V represents velocity, h represents height, γ represents track inclination, α represents angle of attack, q represents pitch angle velocity, η and Indicates the elastic mode, δ e Indicates rudder deflection angle, Φ indicates throttle valve opening; d γ 、d θ and d q Indicates unknown external interference; m, I yy and g den...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More