

Arm length adjusting device and tensioning mechanism of upper limb exoskeleton rehabilitation robot
A rehabilitation robot and tensioning mechanism technology, applied in the direction of manipulators, passive exercise equipment, program-controlled manipulators, etc., can solve problems such as no good solutions, achieve compact structure, improve reliability, and reduce structural complexity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
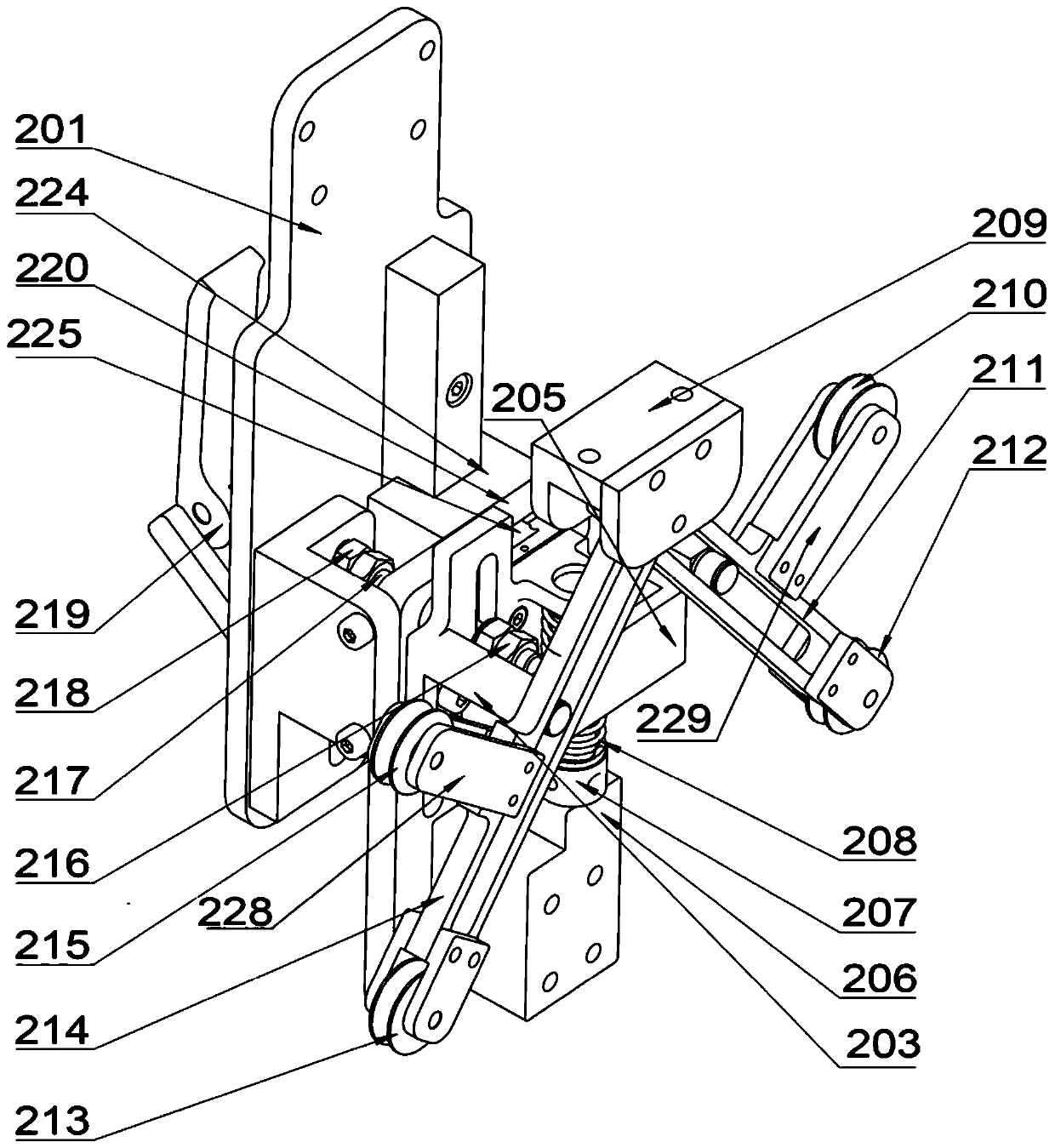
[0036] Such as figure 1 and Figure 4 As shown, the present invention discloses an arm length tensioning mechanism of an upper extremity exoskeleton rehabilitation robot, which includes an automatic tensioning part used for automatic tensioning of the power rope, and the automatic tensioning part includes a skateboard assembly, a second sliding unit, an original It is an elastic component in a compressed state and a tensioning component, wherein the tensioning component includes a first strut 211 and a second strut 214 that are opened and set respectively on the left and right, and one end of the first strut 211 and the second strut 214 are rotatable Fixedly connected, the power rope is tensioned and set on the other end of the first strut 211 and the second strut 214, the first strut 211 and the second strut 214 are respectively provided with a second groove, and the second sliding unit is along the The length direction of the mechanical arm is fixedly arranged, the slide pl...
Embodiment 2
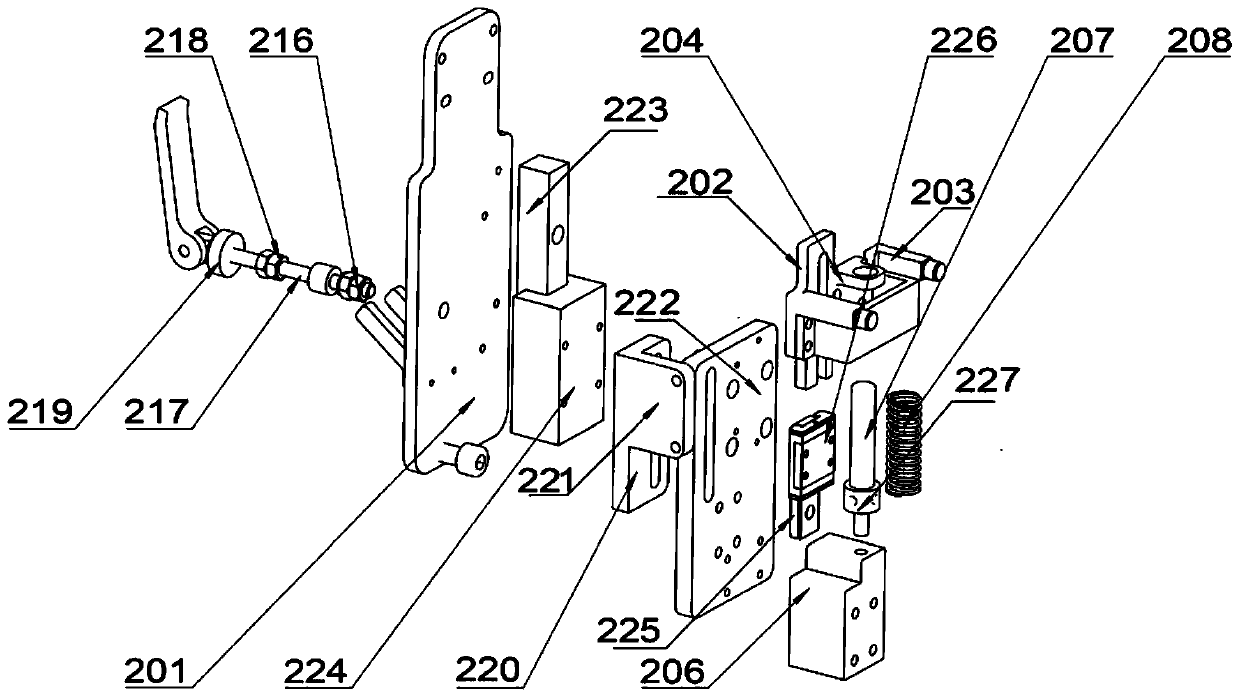
[0047] On the basis of the first embodiment above, the arm length tensioning mechanism shown in the present invention also includes an arm length adjustment part, such as figure 1 or Figure 4 As shown, the arm length adjustment part includes a mounting plate 201 and a first sliding unit. The upper end of the mounting plate 201 is fixedly connected with the shoulder joint mechanism 1. The first sliding unit is fixed on the inner end surface of the mounting plate 201 and along the length direction of the mechanical arm. Arrangement; the automatic tensioning part is fixedly connected to the elbow joint mechanism 3 and integrally fixed on the first sliding unit, so that the entire elbow joint assembly 3 can slide flexibly along the length direction of the mechanical arm, so that the length of the entire mechanical arm can be adjusted freely.
[0048] As a preferred solution, in this embodiment, the first sliding unit includes a first guide rail 223 and a first slider 224 arranged...
Embodiment 3
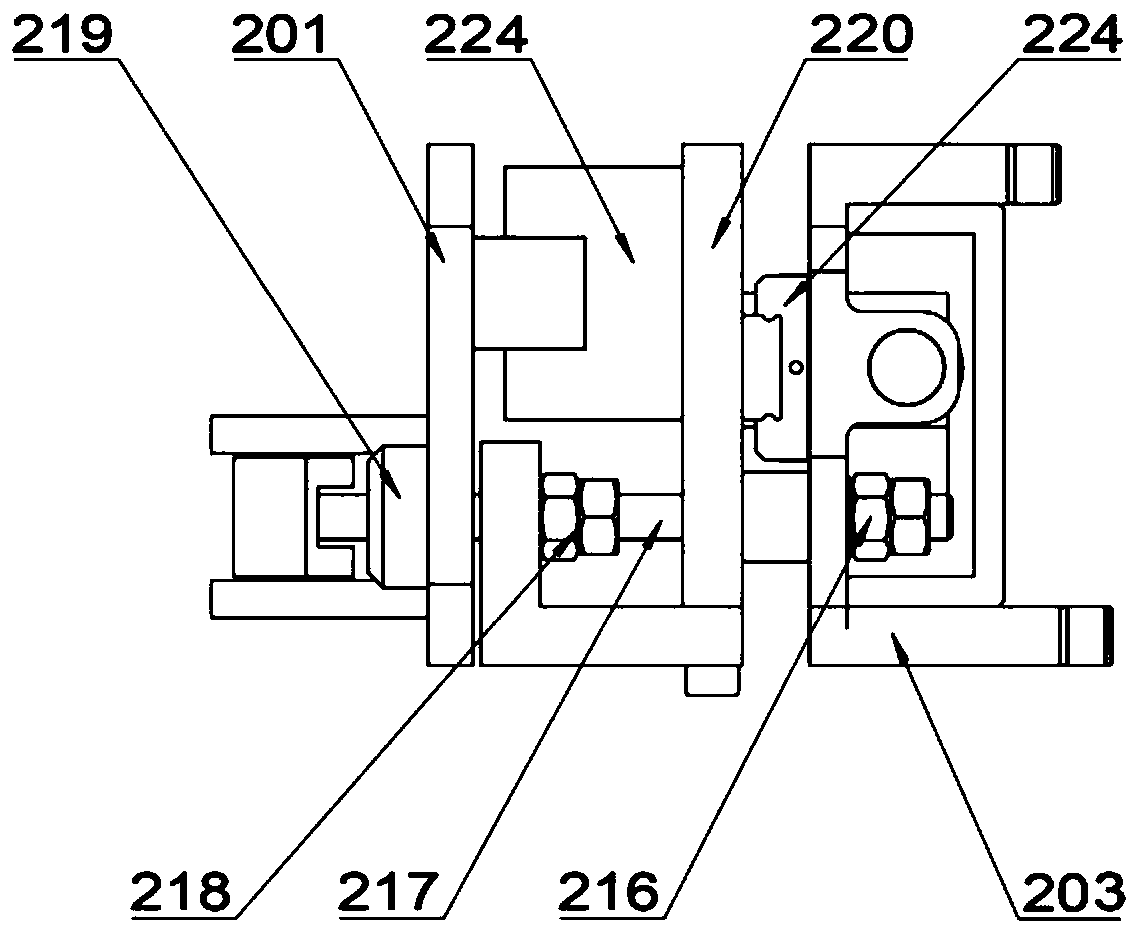
[0053] On the basis of the second embodiment above, the arm length tensioning mechanism shown in the present invention also includes a pressing part, wherein, as figure 2 , image 3 and Figure 5 As shown, the compression part includes a compression handle 219, a compression screw 217, a primary compression nut 218, a secondary compression nut 216 and a compression assembly; the compression assembly is arranged on the arm length adjustment part and the automatic tensioning part Between, including the first connecting plate 220 arranged along the length direction of the mechanical arm, the vertical connecting ear plate 221 vertically fixedly connected with the first connecting plate 220, and a supporting plate 222 arranged parallel to the first connecting plate 220, the supporting plate 222 One end surface is fixedly connected with the slider of the first sliding unit, the slider of the second sliding unit is arranged on the other end surface of the supporting plate 222, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More