

Pose determination method and device based on depth information, medium and electronic equipment
A technology of depth information and pose, applied in the field of computer vision, can solve the problem of low tracking accuracy, achieve the effect of increasing tracking accuracy, reducing influence, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Example embodiments will now be described more fully with reference to the accompanying drawings. Example embodiments may, however, be embodied in many forms and should not be construed as limited to the examples set forth herein; rather, these embodiments are provided so that this disclosure will be thorough and complete and will fully convey the concept of example embodiments to those skilled in the art. The described features, structures, or characteristics may be combined in any suitable manner in one or more embodiments.
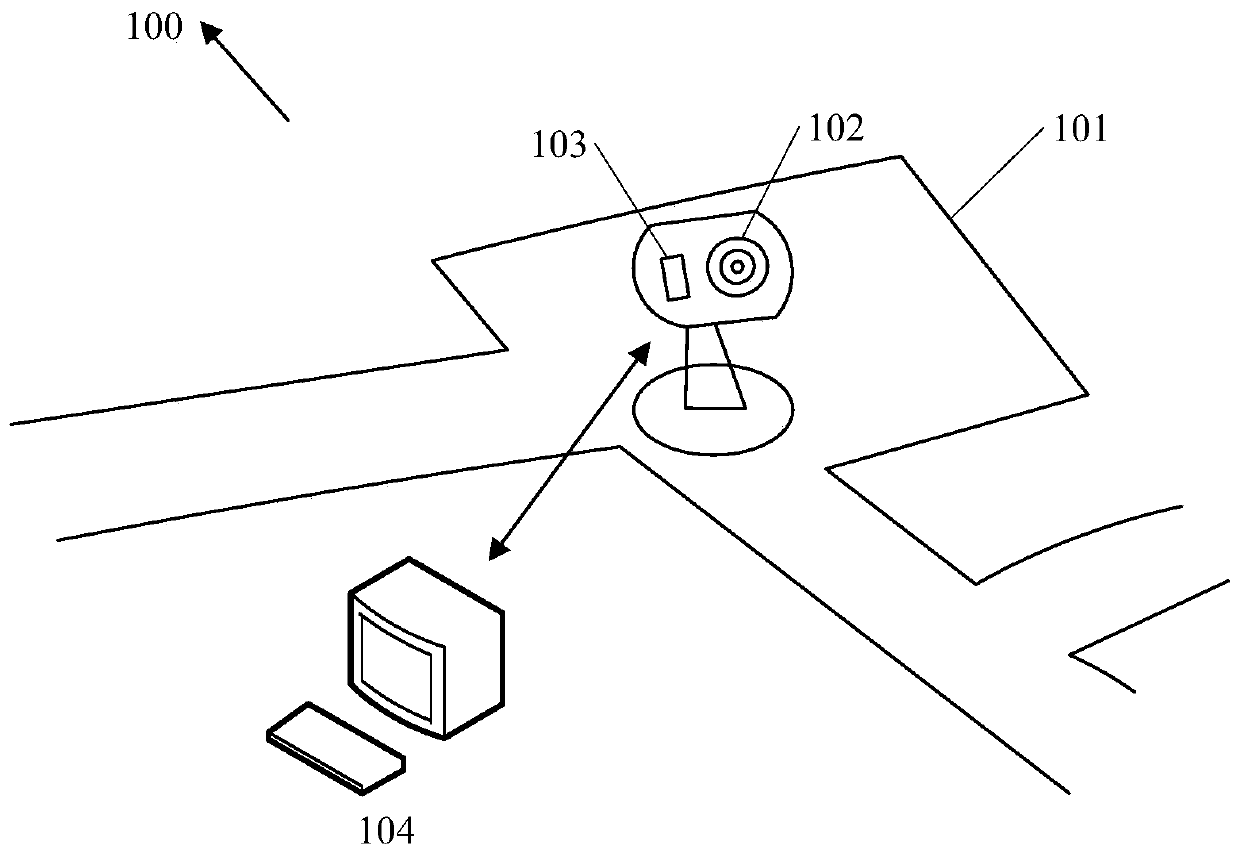
[0023] An exemplary embodiment of the present disclosure firstly provides a method for determining a pose based on depth information. The method for determining a pose is mainly applied in a SLAM scene to determine a pose of a camera. figure 1 The SLAM system architecture diagram of the application environment of the method is shown. Such as figure 1 As shown, the SLAM system 100 may include: a scene 101 , a movable camera 102 , a movable dept...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More