

Archive management robot
A file management and file management system technology, applied in the field of intelligent machinery and equipment, can solve the problems of high labor cost, high error rate, and easy fatigue, etc., and achieve the effect of stable work, low error rate, high work efficiency, and high degree of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to further explain the technical solution of the present invention, the present invention will be described in detail below through specific examples.
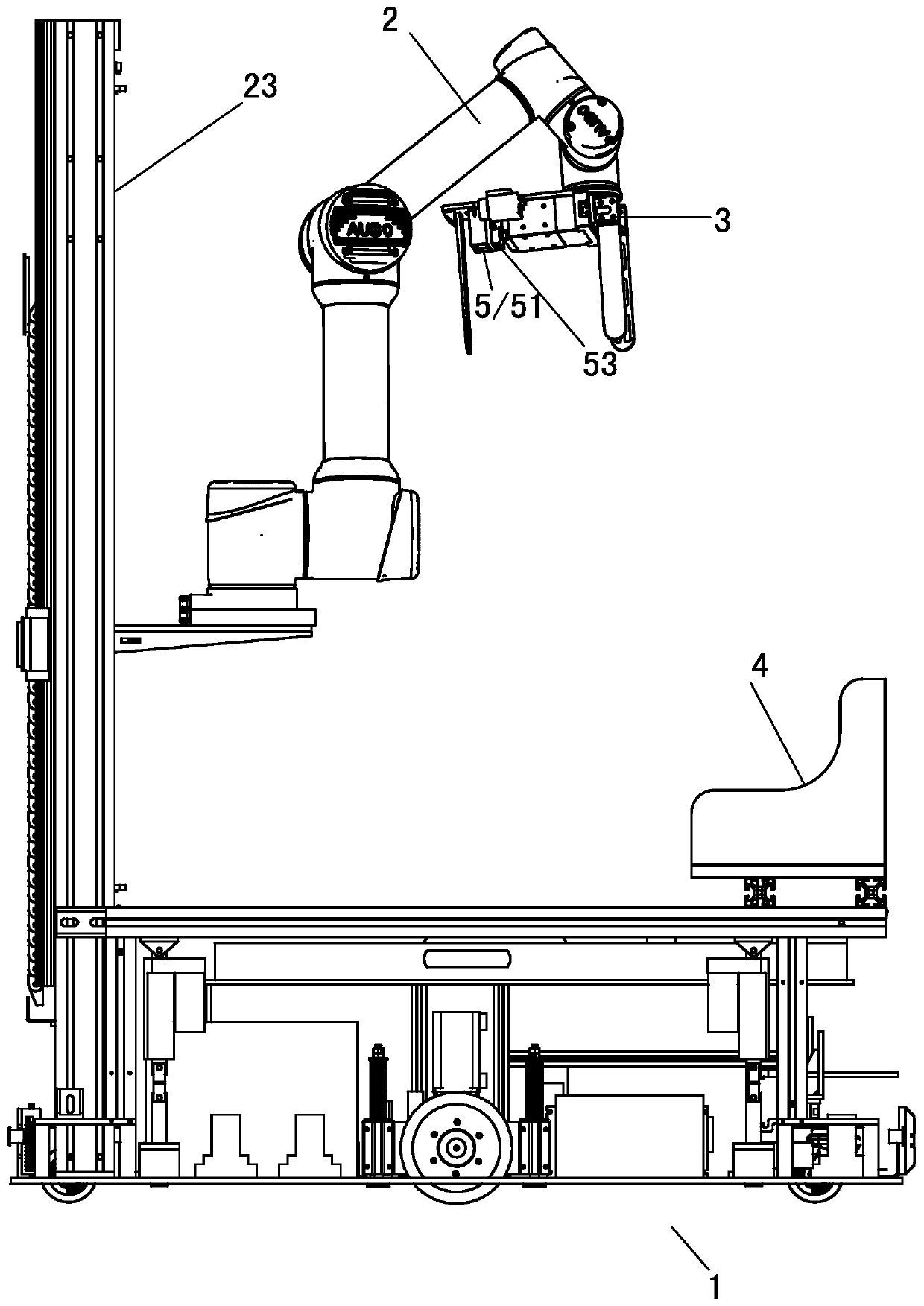
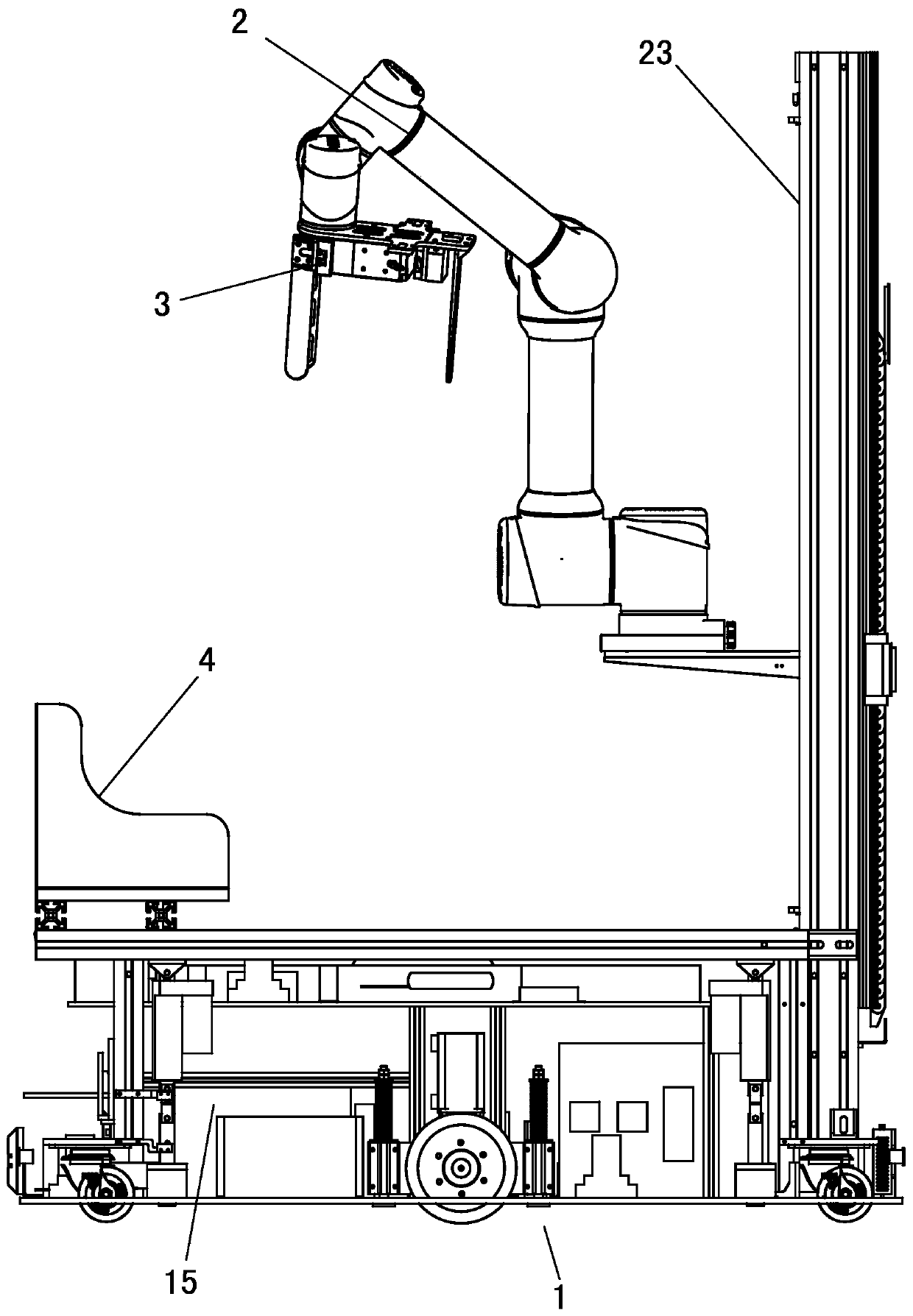
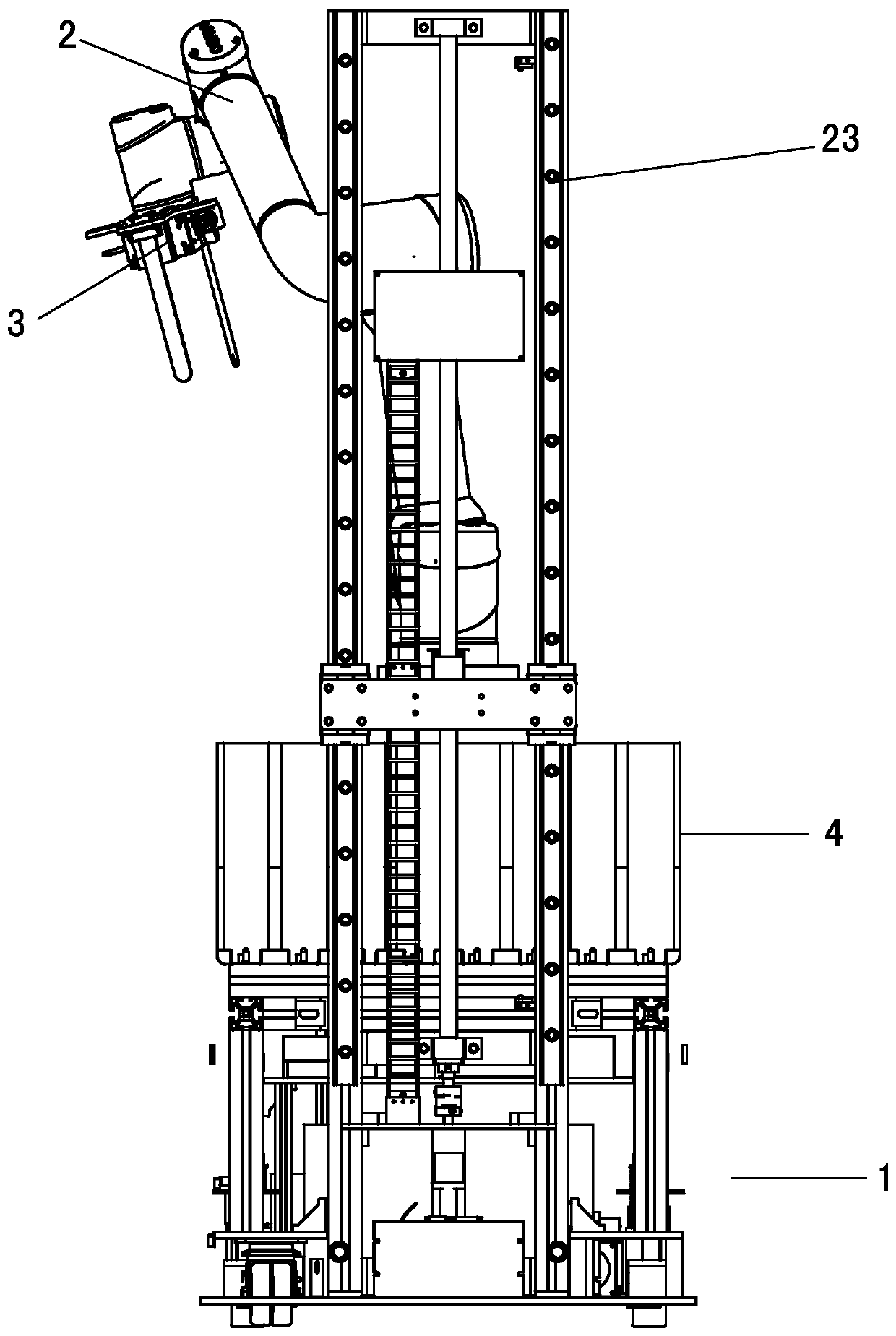
[0029] A file management robot disclosed by the present invention, such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 and Figure 7 As shown, it includes intelligent navigation and positioning transport vehicle 1, mechanical arm 2, electric gripper 3, file transfer frame 4, file identification module 5 and file management system server (or host computer, etc., not shown in the figure), combined below The accompanying drawings describe in detail the positional connection relationship of each part.
[0030] The intelligent navigation and positioning transport vehicle 1 refers to intelligent walking equipment with functions such as navigation and positioning. With the rapid development of intelligent walking equipment, at present, there are many kinds of known intelligent walking equ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More